
Overview
What Is Terradynamics and Why Do We Need It?
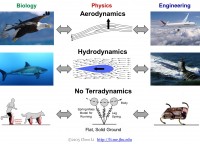
As animals and robots move in the real world, they must physically interact with the surrounding terrain with complexity that rivals that with fluids during flight and swimming. Analogous to aero- and hydrodynamics, to better understand biological movement and advance robotic mobility, we must create terradynamics.
How Do We Create Terradynamics?
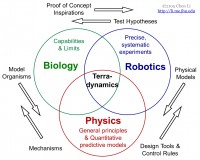
As is the case with aero- and hydrodynamics, the creation of terradynamics requires integration of knowledge and tools of biology, engineering, and physics. Through this powerful integrative approach, we have so far created the first terradynamics for flowable ground and begun expanding terradynamics to 3-D, multi-component terrain.
Watch video to learn more.
1. Energy landscape approach to locomotor transitions
 Energy landscape approach to locomotor transitions in complex 3D terrain
Energy landscape approach to locomotor transitions in complex 3D terrain
We discovered that locomotor transitions of animals and robots on complex 3-D terrain correspond to barrier-crossing transitions on a potential energy landscape. Our energy landscape approach helps understand how multipathway transitions across locomotor modes statistically emerge from physical interaction with the complex terrain.
 Principles of multi-legged locomotor transitions in complex 3-D terrain
Principles of multi-legged locomotor transitions in complex 3-D terrain
We discovered general principles of locomotor transitions of animals and robots in complex 3-D terrain by abstracting complex terrain as a composition of diverse large obstacles that present distinct locomotor challenges. To understand physical principles of locomotor transitions, we studied different model systems using animal experiments, robotic physical modelling, potential energy landscapes modelling, dynamic templates, and multibody dynamics simulations. General physical principles and strategies from our studies advanced robot performance in simple model systems.
2. Limbless locomotion over large steps

Snake robot traversing large steps
We developed a snake robot with a partitioned gait and snake-like anisotropic friction and used it as a physical model to understand stability principles. The robot traversed steps as high as a third of its body length rapidly and stably. However, on higher steps, it was more likely to fail due to more frequent rolling and flipping over, which was absent in the snake with a compliant body. Adding body compliance reduced the robot's roll instability by statistically improving surface contact, without reducing speed. Besides advancing understanding of snake locomotion, our robot achieved high traversal speed surpassing most previous snake robots and approaching snakes, while maintaining high traversal probability.
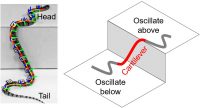
Snakes partition body to traverse stably
We discovered that snakes partition their body to traverse large 3-D terrain like steps. By doing so, they can maintain near-perfect static stability while generating thrusts to overcome drag. This body partitioning strategy is conserved when terrain properties like surface friction and step height changes. We also observed similar partitioning for other types of 3-D terrain. These results suggest that this may be a strategy generally useful for traversing complex 3-D terrain.
3. Legged locomotion over large steps and bumps
Large gap traversal – First dynamic template for locomotion in 3-D terrain
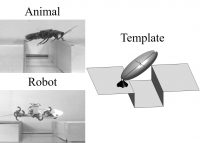
We discovered that rapidly running animals and robots use high approach speed and a pitched up body posture to facilitate traversal of a large gap obstacle. From this discovery, we used a simple active tail mechanism to pitch our robot that increased gap traversal performance by 50%. In contrast to slow precisely planned maneuvers, these dynamic strategies allow an animal or robot to traverse a gap larger than its body length.
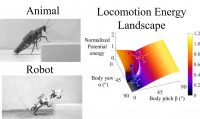
Large bump traversal – Locomotion energy landscape reveals mechanical principles
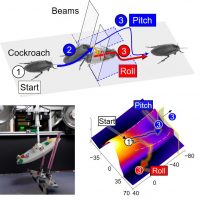
Animals and robots often move much faster than their ability to sense and react to obstacles in the environment and often collide with them. Here we found that upon collision with a bump, body orientation affects whether the animal or robot traverse the bump or was deflected. Animals and robots with a pitched up body that collided head-on were more likely to traverse than be deflected. From these principles, we applied an active body pitching control strategy to our robot that increased traversable bump height by 75%.
4. Legged locomotion through grass-like beams
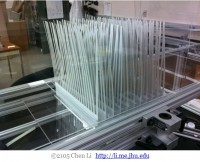
Control & Variation of Beam Obstacles
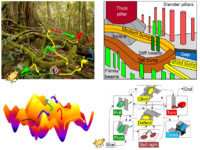
Analogous to wind tunnel and flow channel for studying movement in fluids, we create a new device that mimic grass-like beam obstacles and allow precise control and systematic variation of beam parameters, and enable precise and repeatable experiments.
Biology & Robotics - Diverse Locomotor Pathways
In contrast to single-mode, stereotyped locomotion on flat, solid ground in most locomotion studies, we discover that in 3-D, multi-component terrain, animals transition among multiple locomotor modes, forming diverse locomotor pathways. This not only provides a more accurate representation of locomotion in nature, but is also what mobile robots must advance towards.
Biology & Robotics - Terradynamic Streamlining
Analogous to streamlined body shapes that reduce drag and enhance movement in fluids, in our biology studies we discover terradynamically streamlined body shapes that enhance movement in 3-D, multi-component terrain. This new concept has enabled our robot to traverse densely cluttered obstacles simply via mechanics, without sensing, computation, or additional control.
5. Self-Righting

Biology - Insect Self-Righting
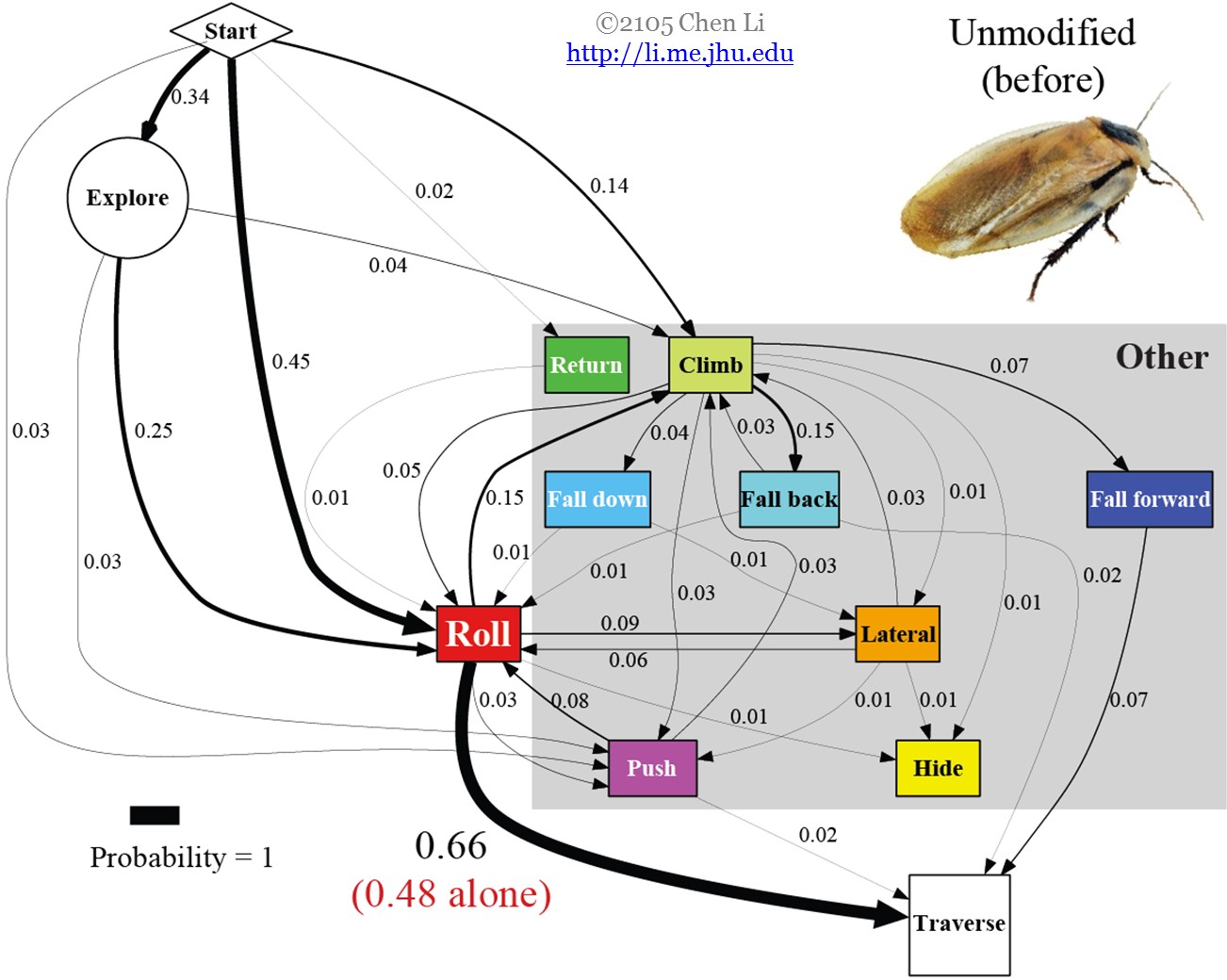
Self-righting from an upside-down orientation to recover upright orientation after flipping over is a critical locomotor transition that almost all animal must do to survive. We have performed comparative studies using different species of cockroaches, quantified their diverse strategies and transitions among strategies, and used a simple potential energy landscape model to understand what governs such transitions.

Robotics - Bio-Inspired Self-Righting Robots
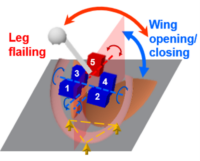
Although their wings folded against the back help streamline the body for cluttered obstacle traversal (see terradynamic streamlining above), the discoid cockroach co-opts its wings for another critical function--opening them when it flips over to self-right. Inspired by this biological exaptation, we split the rounded shell for obstacle traversal added to the robot and added motors to modify them as wings for self-righting. We used this robot as a physical model to systematically study the principles of dynamic self-righting using wings, which in turn helps inform biology.
 Simulation - Randomness Facilitates Strenuous Self-righting
Simulation - Randomness Facilitates Strenuous Self-righting
We discovered that randomness in wing-leg coordination facilitated self-righting, especially at intermediate wing opening and leg oscillation amplitudes, when the system’s kinetic energy was about to overcome the potential energy barrier. Randomness allowed the system to explore various phases more thoroughly between wing and leg oscillations, thereby increasing the chance of finding a good coordination between them.
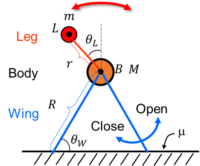 Template Model - Coordinated Appendages Help Accumulate More Energy
Template Model - Coordinated Appendages Help Accumulate More Energy
We developed a template of leg-assisted, winged ground self-righting and used it to elucidate why wing-leg coordination affected self-righting outcome. With good coordination, the system better accumulates mechanical energy to overcome the potential energy barrier and thus self-rights more successfully.