
Robophysics: Robotics Meets Physics We are hosting the 11th annual Focus Session on Robophysics at the APS March Meeting, to be held in Denver, CO, USA, March 15-20, 2026. Besides physicists, any biologists, engineers, applied mathematicians, etc. studying robots (on their own or as active/physical/synthetic/simulated models of natural systems) are welcome! Please forward this abstract…

Our mudskipper on mud research is featured in The Wild Kratts
PBS’s Wild Kratts Visit Chen Li’s Terradynamics Lab https://pbskids.org/videos/watch/wild-kratts-full-episodes/1385807/fish-out-of-water/1485713 https://pbskids.org/videos/watch/wild-kratts-full-episodes/1385807/fish-out-of-water/1485713 https://pbskids.org/videos/watch/wild-kratts-full-episodes/1385807/fish-out-of-water/1485713 https://pbskids.org/videos/watch/wild-kratts-full-episodes/1385807/fish-out-of-water/1485713

2022-2023 lab graduates starting grad school
The following students are starting graduate school this Fall: Gargi Saldagekar is starting as PhD student in our lab Jack Rao is starting as PhD student at Stanford ME Jonathan Mi is starting as PhD student at UMich Ann Arbor ME Congratulations!

Perspective on robot learning to run on sand
Here is a little perspective on a beautiful work that integrated data-driven learining & simulations with good models from vigorous experimental research to enable legged robots to achieve animal-like running on sand (with Feifei Qian): https://rdcu.be/c8dTG

Qiyuan Fu defended his PhD
Congratulations to Qiyuan Fu for successfully defending his PhD dissertation! Qiyuan will join Auke Ijspeert’s Biorobotics Lab at EPFL this summer to perform postdoctoral research on amphibious robot locomotion. Congratulations Dr. Fu! Noah Cowan, Henry Astley (virtual), Qiyuan Fu, Chen Li

Divya & Gargi selected as finalists for 2023 SICB DCB Best Student Paper
PhD student Divya Ramesh and Master student Gargi Sadalgekar are selected as two out of finalists for Best Student Paper in the Division of Comparative Biomechanics of the upcoming 2023 Society for Integrative & Comparative Biology Annual Meeting, for the work they each leads on fish and fish robot locomotion on mud, respectively. They will…

Our paper is one of three finalists for ICRA 2022 Outstanding Locomotion Paper
Mi J, Wang Y, *Li C (2022). Omni-Roach: A legged robot capable of traversing multiple types of large obstacles and self-righting, IEEE International Conference on Robotics and Automation (ICRA), in press (Movie) PDF Congratulations Jonathan and Yaqing!
2021-2022 lab graduates starting grad school
The following students are starting graduate school this Fall: Yishun Zhou is starting as PhD student at UMichigan Robotics Yifeng Zhang is starting as PhD student at USC ECE Congratulations!
2020-2021 lab graduates starting grad school
The following students are starting graduate school this Fall: Bokun Zheng is starting as PhD student at Virginia Tech ME Ryan Utz is starting as PhD student at CMU ME Congratulations!
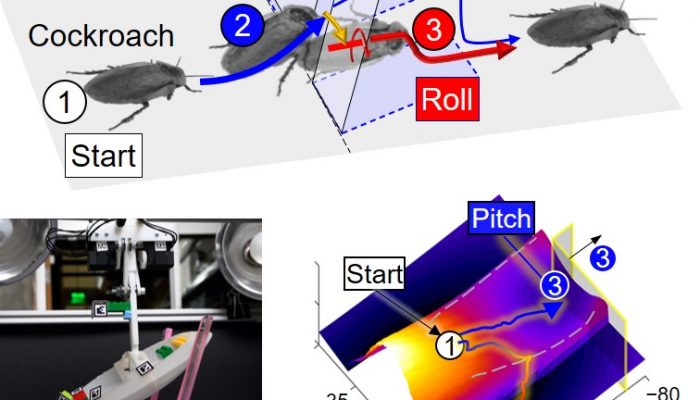
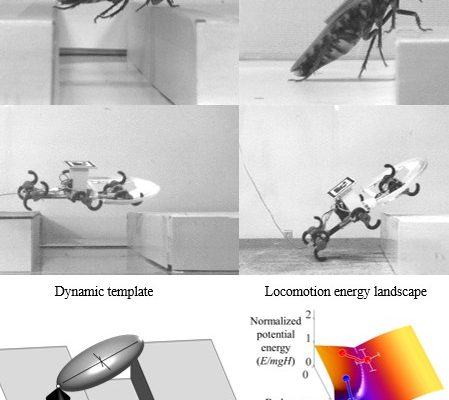
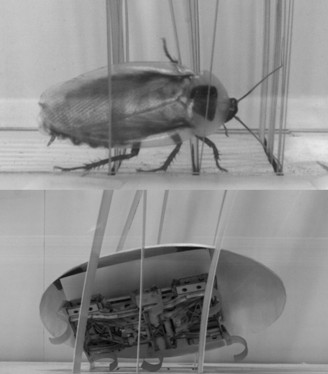
Our paper on energy landscape approach is published
We developed an energy landscape to understand the physical principles of probabilistic locomotor transitions in complex 3D terrain. For a model system of cockroaches traversing beam-like obstacles, using animal experiments and robotic physical modelling, we demonstrated that locomotor transitions of animals and robots on complex 3-D terrain correspond to barrier-crossing transitions on a potential energy…
We presented at APS March Meeting via virtual session
We presented at APS March Meeting via the Robophysics virtual session, despite meeting cancellation: Othayoth R, Thoms G, *Li C (2020), Robots and animals transition from less to more favorable modes to traverse obstacles, Bulletin of the American Physical Society 65 Abstract Xuan Q, *Li C (2020), A template model reveals self-righting mechanism of a winged robot, Bulletin of the American Physical Society…
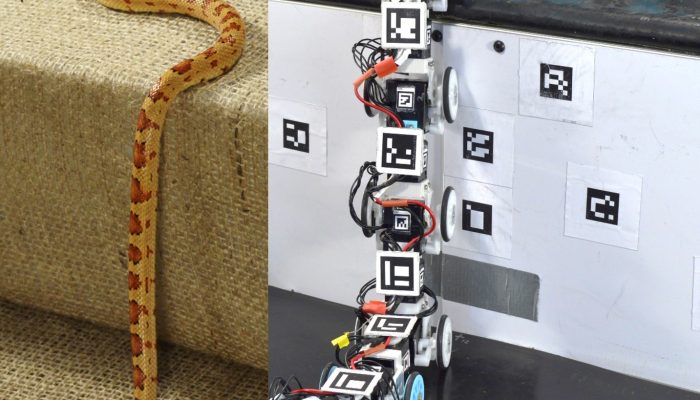
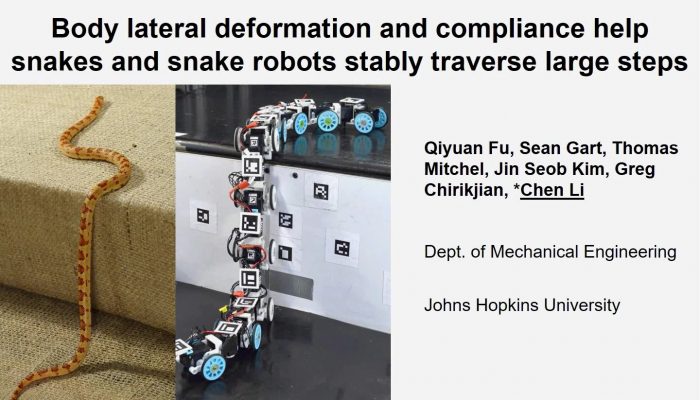
Our paper on snake robot traversing large steps is published
We developed a snake robot with a partitioned gait and snake-like anisotropic friction and used it as a physical model to understand stability principles. The robot traversed steps as high as a third of its body length rapidly and stably. However, on higher steps, it was more likely to fail due to more frequent rolling…

We presented at SICB 2020
Qihan Xuan, Ratan Othayoth, Chen Li, Qiyuan Fu, Yaqing Wang Othayoth R, Thoms G, *Li C (2020), Animals and robots transition from more challenging to easier locomotor modes to traverse obstacles, Integrative and Comparative Biology 60 Abstract Xuan Q, *Li C (2020), Template model reveals mechanism of wing and leg coordination during self-righting of a cockroach-inspired robot, Integrative and Comparative Biology 60 Abstract Wang…

We are selected for a JHU Catalyst Award
Prof. Chen Li is selected as one of 33 early-career faculty member to receive a 2019 Catalyst Award of Johns Hopkins University, designed to support promising research and creative endeavors. We thank the University and the award committee for recognizing and supporting our work.

Our paper on snake traversing large steps is published
We discovered that snakes partition their body to traverse large 3-D terrain like steps. By doing so, their can maintain near-perfect static stability while generating thrusts to overcome drag. This body partitioning strategy is conserved when terrain properties like surface friction and step height changes. We also observed similar partitioning for other types of 3-D…
2018-2019 lab graduates starting grad school & jobs
The following students are starting graduate school this Fall: Allen Ren is starting as PhD student at Princeton MAE Yaqing Wang is starting as PhD student at JHU ME Tim Greco is starting as PhD student at UPenn ESE Daniel Hse is starting as MSE student at MIT ME Rafael de la Tijera Obert is…

Allen Ren wins departmental award again
Undergraduate researcher Zhiyi (Allen) Ren wins the another award from Department of Mechanical Engineering, Robert George Gerstmyer Award for outstanding undergraduate achievement! He is going to Princeton MAE department this Fall to start his PhD research in robot control and motion planning. Congratulations! Keep up the great work.
Prof. Li presented at Kavli Frontiers of Science, National Academy of Science
Prof. Li is selected as an alumnus of Kavli Frontier of Science, National Academy of Science, and presented a poster at its 2019 30th Annual U.S. Symposium at the Beckman Center.

We presented at SICB 2019
Qihan Xuan, Qiyuan Fu, Ratan Othayoth Othayoth R, Thoms G, *Li C (2019), Animals and robots vibrate to explore locomotion energy landscapes to make locomotor transitions, Integrative and Comparative Biology 59 Abstract Xuan Q, Othayoth R, *Li C (2019), In silico experiments reveal the importance of randomness of motions in cockroach’s winged self-righting, Integrative and Comparative Biology 59 Abstract Gart SW, Fu Q, Mitchel TW,…

Ratan Othayoth selected as finalist for SICB 2019 DCB Best Student Paper Award
Ratan Othayoth was selected for the second time in two consecutive years as a finalist for Best Student Paper Award of Division of Comparative Biomechanics at Society for Integrative & Comparative Biology 2019. Congratulations Ratan, and keep up the good work!
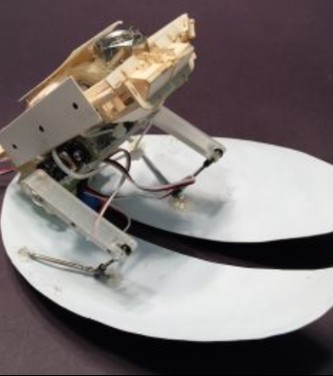
Our Advanced Robotics paper wins Best Paper Award
Our journal paper on mechanical principles of winged self-righting wins the 6th Advanced Robotics Best Paper Award! *Li C, Kessens CC, Fearing RS, Full RJ (2017). Mechanical principles of dynamic terrestrial self-righting using wings, Advanced Robotics, 31, 881-900 (Invited Paper) PDF

Sean Gart starts his job at ARL
Our lab postdoc, Sean Gart, “graduated” from the lab and is starting his permanent job at Army Research Lab as Mechanical Engineer in the Autonomous Systems Division. As the first member to join the lab, Sean has made crucial contributions to the initial setup and ongoing research program of the lab. Sean’s excellent…
2017-2018 lab graduates starting grad school & jobs
The following students are starting graduate school this Fall: Mona Gao is starting as PhD student at Berkeley ME Zhiyu Zhang is starting as PhD student at Boston U. Sys. Engr. Dongkai Wang is starting as a PhD student at Tsinghua-Berkeley Shenzhen Institute Jundong Yi is starting as MSE student at CMU ME Nansong Yi…
We received a Beckman Young Investigator Award
Prof. Chen Li is selected as a Beckman Young Investigator. We thank the Arnold and Mable Beckman Foundation for supporting our fundamental research and novel approach.

High school intern Evains Francois won awards at Baltimore Science Fair
Our high school student intern Evains Francois presented his research on cockroach-inspired legged robots at the Baltimore Science Fair and won two awards: Third place award presented by the National Institute on Drug Abuse in the physical sciences Honorable mention award presented by the INCOSE Chesapeake Chapter Congratulations to Evains (and his graduate student mentor…
Allen Ren and Mona Gao won competitive awards
Allen Ren was selected as a 2018 Robotics Institute Summer Scholars from Carnegie Mellon University. Allen Ren also won a James F. Bell Award for outstanding research and scholarly achievement from JHU’s ME department. Mona Gao won a Robert George Gerstmyer Award for outstanding undergraduate from JHU’s ME department. Congratulations! Allen in the RISS 2018 Cohort…
We presented at APS March Meeting 2018
Qiyuan, Allen, Ratan, and Tommy are presenting at APS March Meeting in Los Angeles. Mitchel TW, Xuan Q, Kim JS, Chirikjian GS, *Li C (2018), A novel 3-D full body model of snake locomotion in complex 3-D terrains, Bulletin of the American Physical Society 63 Abstract Othayoth R, *Li C (2018), Insects change locomotion modes to traverse 3-D obstacles with…
Our two papers on mechanical principles of dynamical traversal of large gap and bump obstacles are published
https://youtu.be/RO9TVPt5X-QVideo can’t be loaded because JavaScript is disabled: Cockroach Robot Dynamically Traverses Large Gap & Bump Obstacles (https://youtu.be/RO9TVPt5X-Q) More supplemental movies and press release. Download Gap Paper Download Bump Paper Summary of results: 1. Insects and legged robots can rapidly traverse large gap (up to 1 body length) and bump (up to 4 hip height) obstacles at speeds…

We presented at SICB 2018
We presented research at Society for Integrative & Comparative Biology (SICB) 2018 Meeting in San Francisco on January 4-6. Snakes traversing large step obstacles: kinematics and mechanics Mitchel TW, Gart SW, Kim JS, Chirikjian GS, *Li C Abstract Snakes traversing large step obstacles: behavior, gait, and performance Gart SW, Mitchel TW, *Li C Abstract Cockroaches change locomotor modes…

Ratan Othayoth and Rick Han selected as finalists for SICB 2018 DCB Best Student Paper Award
Ratan Othayoth and Rick Han were selected as 2 of 8 finalists for Best Student Paper Award of Division of Comparative Biomechanics at Society for Integrative & Comparative Biology 2018. Congratulations and keep up the good work!

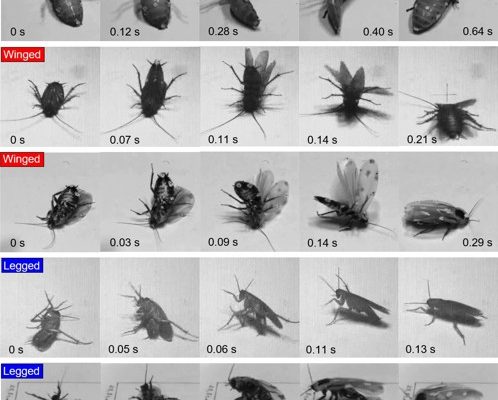
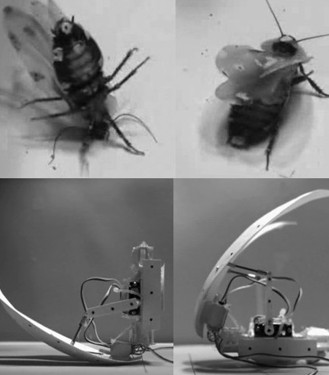
Our journal paper on mechanical principles of dynamic winged self-righting is published
This 2017 Advanced Robotics journal paper is a follow up to our 2016 IROS conference paper. Besides how wing opening magnitude, speed, height, and asymmetry affects the performance of winged dynamic self-righting, it reports additional experimental and modeling results and discussions on: (1) how body mass and mass distribution affects dynamic winged self-righting, and (2) how…

We received a Young Investigator Award from Army Research Office
Prof. Chen Li is selected for an Army Research Office Young Investigator Award. We thank the Army Research Office (Mechanical Sciences Division) for supporting our fundamental research and novel approach.
2016-2017 lab graduates starting grad school & jobs
The following students are starting graduate school this Fall: Nastasia Winey is starting as PhD student at MIT ME Qihan Xuan is starting as PhD student at JHU ME Zheliang Wang is starting as PhD student at JHU ME Yifu Luo is starting as PhD student at Northwestern ME Yucheng Kang is starting as MSE…
We presented at APS March Meeting 2017
Sean, Ratan, Rick, and Scotty presented at American Physical Society March Meeting 2017 in New Orleans, LA. Gart SW, Winey N, Obert RDLT, *Li C (2017), Dynamic traversal of high bumps and large gaps by a small legged robot, Bulletin of the American Physical Society 62 Abstract Othayoth R, Xuan Q, *Li C (2017), Induced vibrations increase performance of…

We presented at SICB 2017
Sean, Ratan, and Rick presented research at Society for Integrative & Comparative Biology (SICB) 2017 Meeting in New Orleans, LA on January 4-8, in the session on Locomotion: Obstacles and Perturbations Gart SW, *Li C (2017), Dynamic traversal of large gaps and high bumps by cockroaches, Integrative and Comparative Biology 57 Abstract Othayoth R, Xuan Q, *Li C (2017),…
Our research is featured in IEEE Spectrum
Our research on cockroach-inspired winged self-righting robot is freatured in IEEE Spectrum.
Prof. Li presented at IROS 2016
Prof. Li presented a highlight paper on cockroach-inspired winged self-righting robot at IROS 2016 in Daejeon, Korea on Oct 12, 2016.
Our paper is selected as a Highlight of IROS 2016
Our paper on cockroach-inspired winged self-righting robot is accepted and selected as one of 20 highlight papers at IROS 2016 (out of over 800 papers). From Program Committee: “selected as one of the top quality IROS 2016 papers.” Download paper Learn more
We expanded into new lab space
We now have three lab rooms: Hackerman B08C Krieger G16 & G35 We also share animal housing facility in G31 with Noah Cowan’s LIMBS Lab.

Our paper is selected as B&B Highlights of 2015
See B&B Highlights of 2015. “selected for presentation of outstanding new research, receipt of the highest praise from our international referees and the largest number of downloads last year.”
Our lab started
Our lab has started! Our first lab space is Hackerman B08C. Two more lab spaces are under renovation and will be ready mid Spring.
Our discovery of terradynamic streamlining is published
Download paper Learn more Selected press: Inside Science IEEE Spectrum IOP News Discovery News Reuters LiveScience VICE Motherboard

We received a Burroughs Wellcome Fund Career Award at the Scientific Interface
Prof. Chen Li is selected for a Burroughs Wellcome Fund Career Award at the Scientific Interface. We thank the Burroughs Wellcome Fund for supporting our fundamental research and novel approach.