
I teach two classes on animal and robot locomotion.
See the first two sections for the scope and topics of each class.
See the third section for logistics for both classes.
EN.530.468/668 Locomotion Mechanics: Fundamentals

Focus
This upper level undergraduate and graduate class will discuss fundamental mechanics of locomotion of both animals and machines, particularly bio-inspired robots. Locomotion emerges from effective physical interaction with an environment; therefore, the ability to generate appropriate forces (besides sensing, control, and planning) is essential to successful locomotion. General principles and integration of knowledge from engineering, biology, and physics will be emphasized.
Topics
- Introduction
- Running
- Walking
- Scaling
- Energetics
- Jumping
- Muscle Function
- Gliding & Soaring
- Hovering & Powered Forward Flight
- Swimming
- Moving on Water Surface
- Terradynamics
- A lab tour on the latest terradynamics research in my lab
Sample questions include:
- How can kangaroos hop faster and fleas jump higher than their muscles allow?
- Why do race walkers use a peculiar hip movement?
- How do animals inspire prosthetic feet that helped Blade Runner compete with abled athletes?
- Why do Boston Dynamics’ robots move so well in most modest environments, and why does it still fail in complex terrain?
- Why do horses walk at low speeds but run at higher speeds?
- Can T-Rex run or must they walk?
- Why do larger animals become more erect in their leg posture?
- How can our muscles serve as energy-saving springs, force transmitting struts, and even energy-damping brakes?
- Why do migrating birds fly in a V-formation?
- Why do insects rotate their wings while flapping to fly?
- How do water striders walk on water and why can’t we do it?
- Do Speedo’s sharkskin swimsuits really reduce drag?
Nearly all these fundamental studies of interesting biological locomotion phenomena have led to engineering devices that use the same physics principles to on the ground, in the air, in and on the surface of water, with performance approaching that of animals.
EN.530.469/669 Locomotion Mechanics: Recent Advances
Focus
This upper level undergraduate and graduate class will discuss recent advances in the mechanics of animal and bio-inspired robot locomotion in complex environments. All of the topics covered are from cutting edge research over the last 20 years, with many still being active research areas. General principles and integration of knowledge from engineering, biology, and physics will be emphasized.
Topics
- Introduction
- Adhesion
- Climbing
- Aerial Self-Righting
- Ground Self-Righting
- Robustness
- Legged Locomotion on Flowable Ground
- Burrowing
- Swarming
- Crawling
- Limbless Locomotion in 3-D Terrain
- Legged Locomotion in 3-D Terrain
- A lab tour on the latest terradynamics research in my lab
Sample topics include:
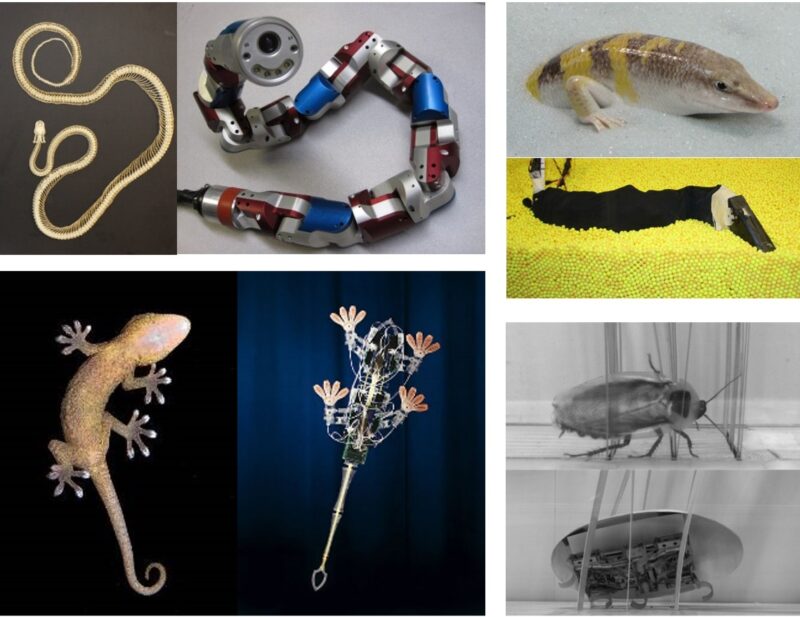
- How do geckos adhere to and climb over almost any surfaces?
- How do all kinds of animals use tails in novel ways to quickly maneuver in the air and on the ground?
- How do sandfish lizards burrow into and swim under sand?
- How do sidewinder snakes crawl up steep sand dunes without triggering an avalanche?
- How do large ants colonies dig and live in narrow tunnels without trapping themselves in traffic jams?
- Why do legged and snake robots struggle on sand and rubble, whereas insects, lizards, and snakes traverse similar terrain at ease?
- How do cockroaches survive after squeezing through gaps with pressure several hundreds of their body weight?
- Why can a mouse falling from a skyscraper walk away with little injury, but a horse will smash?
Nearly all these fundamental studies of interesting biological locomotion phenomena have led to engineering devices that use the same physics principles to move in complex environments, with performance approaching that of animals.
The following applies to both classes above.
Prerequisites
- Students from ME, Robotics, and other programs are all welcome.
- Freshmen and sophomores with sufficient physics background may take with instructor approval.
- Students should have a strong understanding of Newtonian mechanics.
- Recommended background: B or higher in EN.530.202 Dynamics or EN.560.202 Dynamics.
-
To get an idea of what you should be familiar with, see these two syllabus:
-
Our class will not involve some of the more advanced topics in these classes, but will make use of many concepts and basic knowledge you learn from such classes. Understanding most topics and solving problems require you to be familiar with these basics. If you have not taken any class on Newtonian mechanics (i.e., if these topics seem unfamiliar to you) and will not be able to catch up before the class, please consider another class.
-
Grading
Homework (30%) + midterm (20%) + final (40%) + attendance (10%)
Auditing policy
You are welcome to sit in the class (if room capacity allows), but please do NOT sign up for auditing credits so that students who want to take it for letter grade can get in.
Closely-related course
EN.530.676. Locomotion Dynamics & Control
- Prof. Noah Cowan
- Graduate level
- A deep dive into locomotion from a dynamical systems and controls point of view.
- Good mathematical skills are recommended.