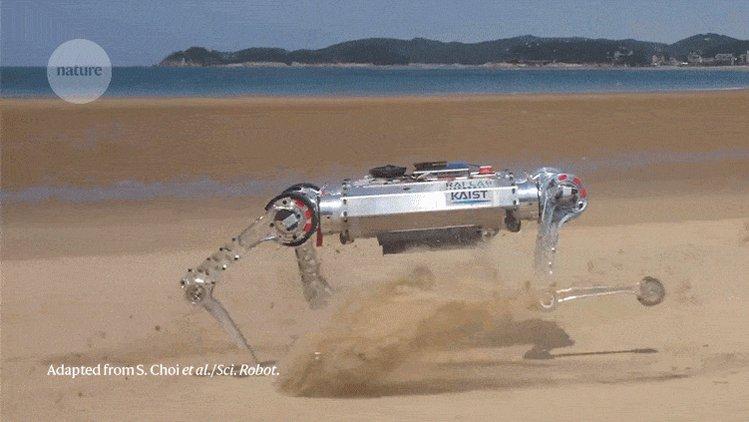
Here is a little perspective on a beautiful work that integrated data-driven learining & simulations with good models from vigorous experimental research to enable legged robots to achieve animal-like running on sand (with Feifei Qian):

Here is a little perspective on a beautiful work that integrated data-driven learining & simulations with good models from vigorous experimental research to enable legged robots to achieve animal-like running on sand (with Feifei Qian):