
We are always looking for highly motivated students who are curious about movement science to join us!
We are most interested in understanding:
-How and why organisms move through, sense, and react to complex environments
-How to use what we learn from organisms to improve robot function in the real world
Follow these instructions to apply

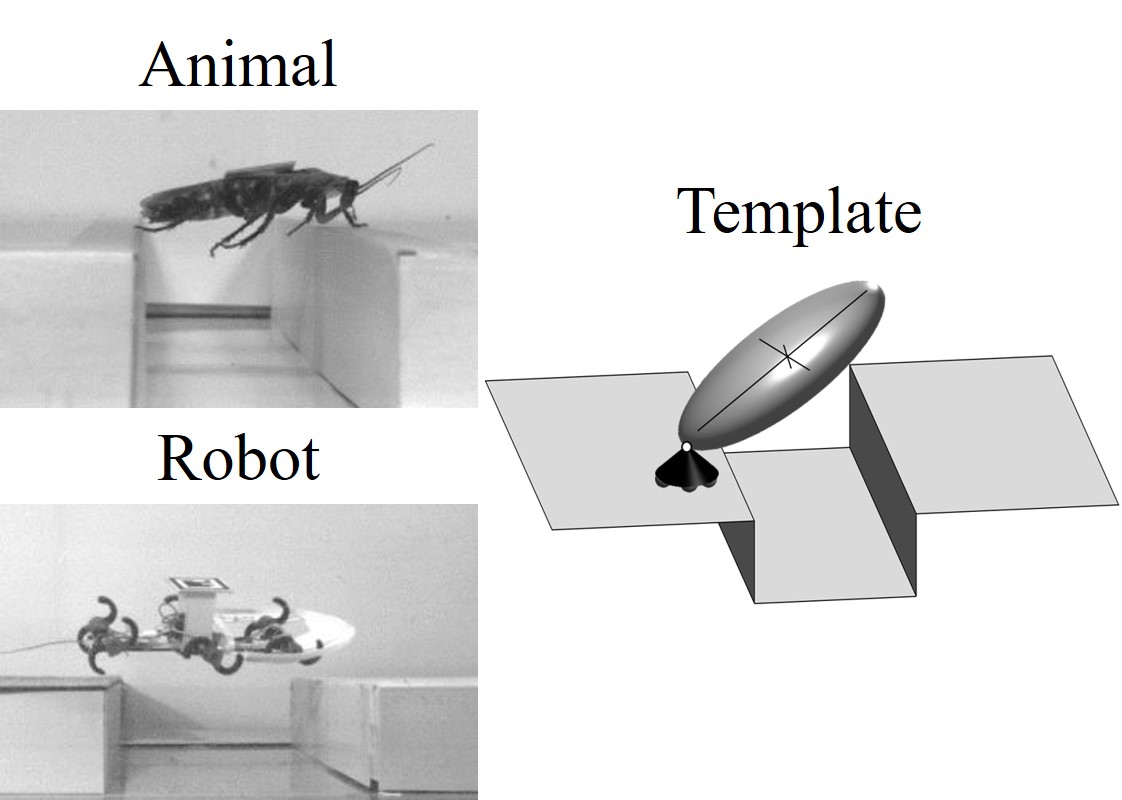
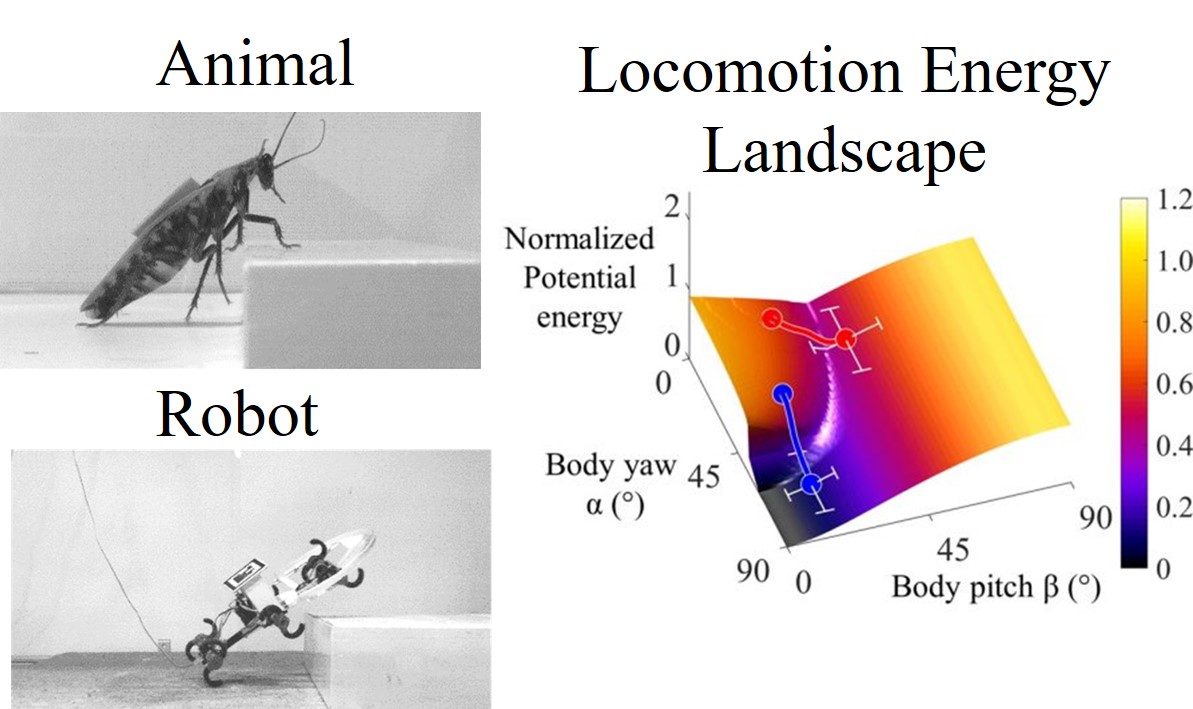
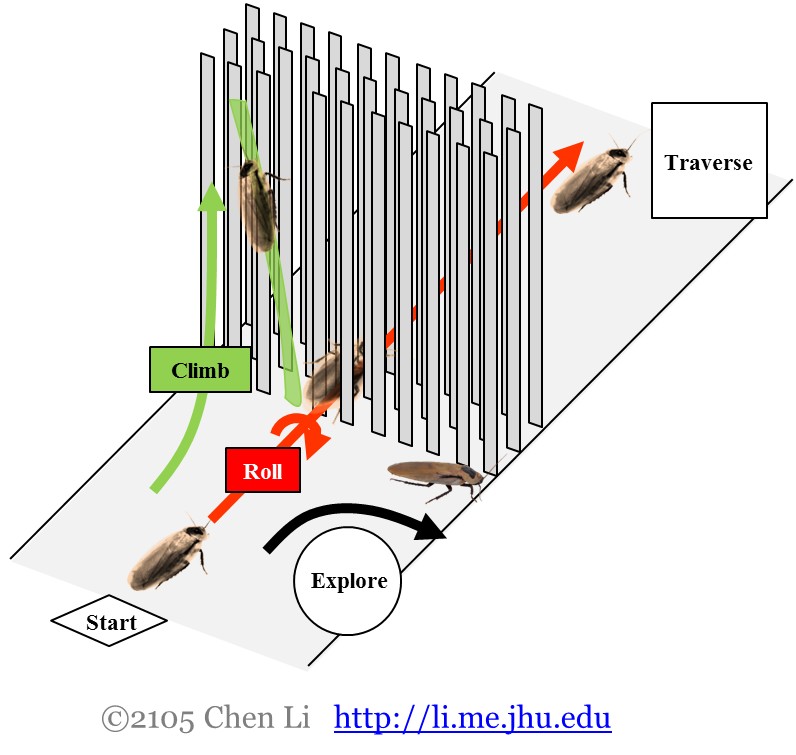
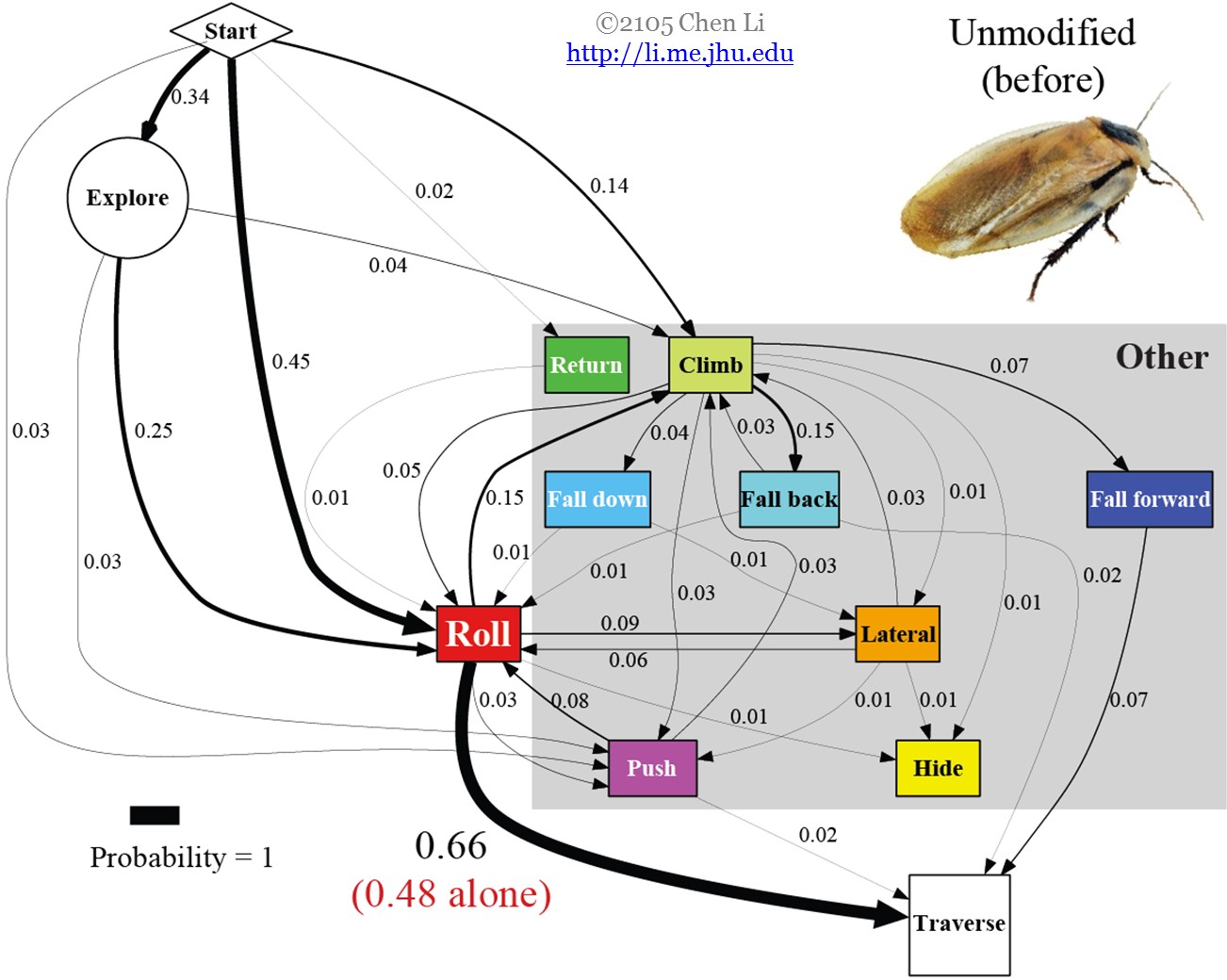
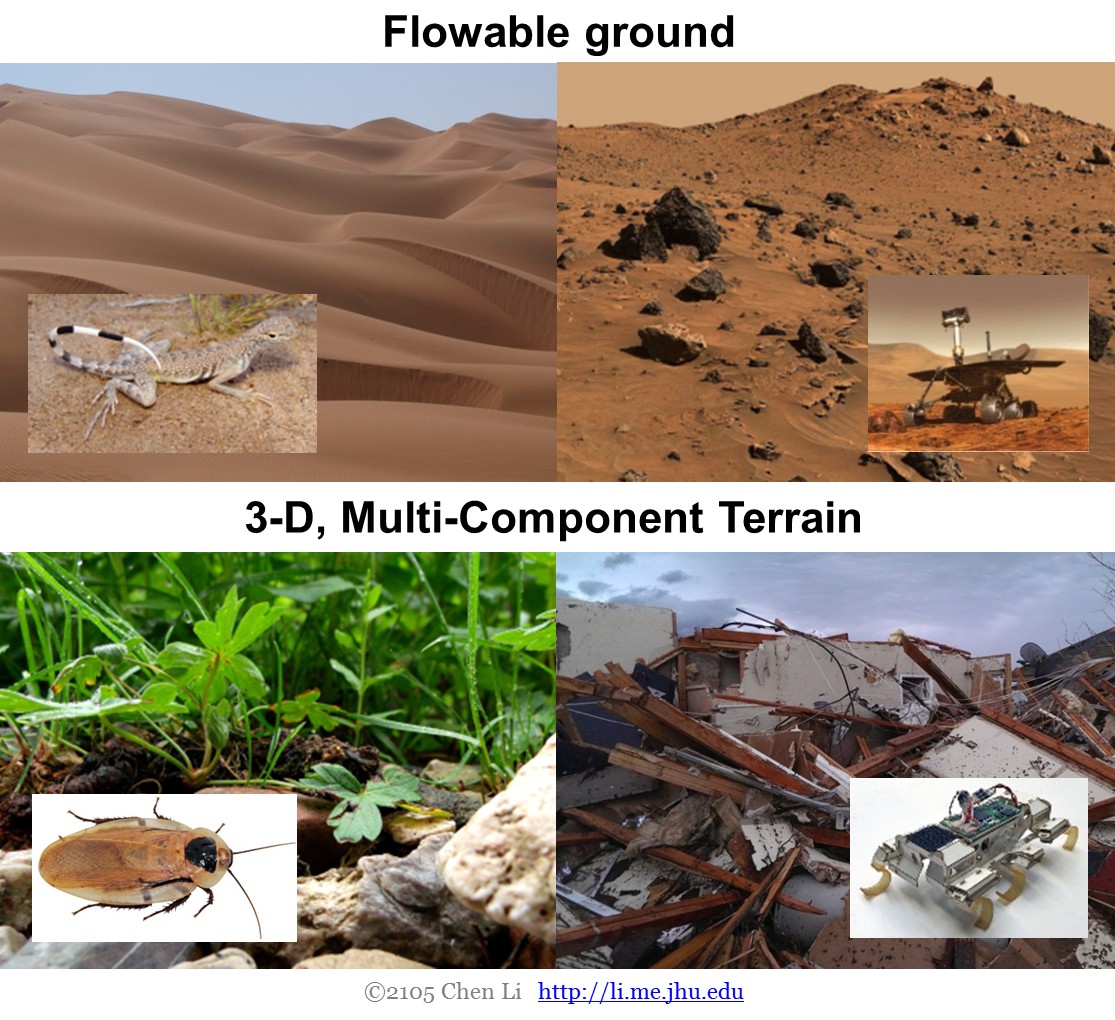
Locomotor transitions in complex 3-D terrain








What We Do
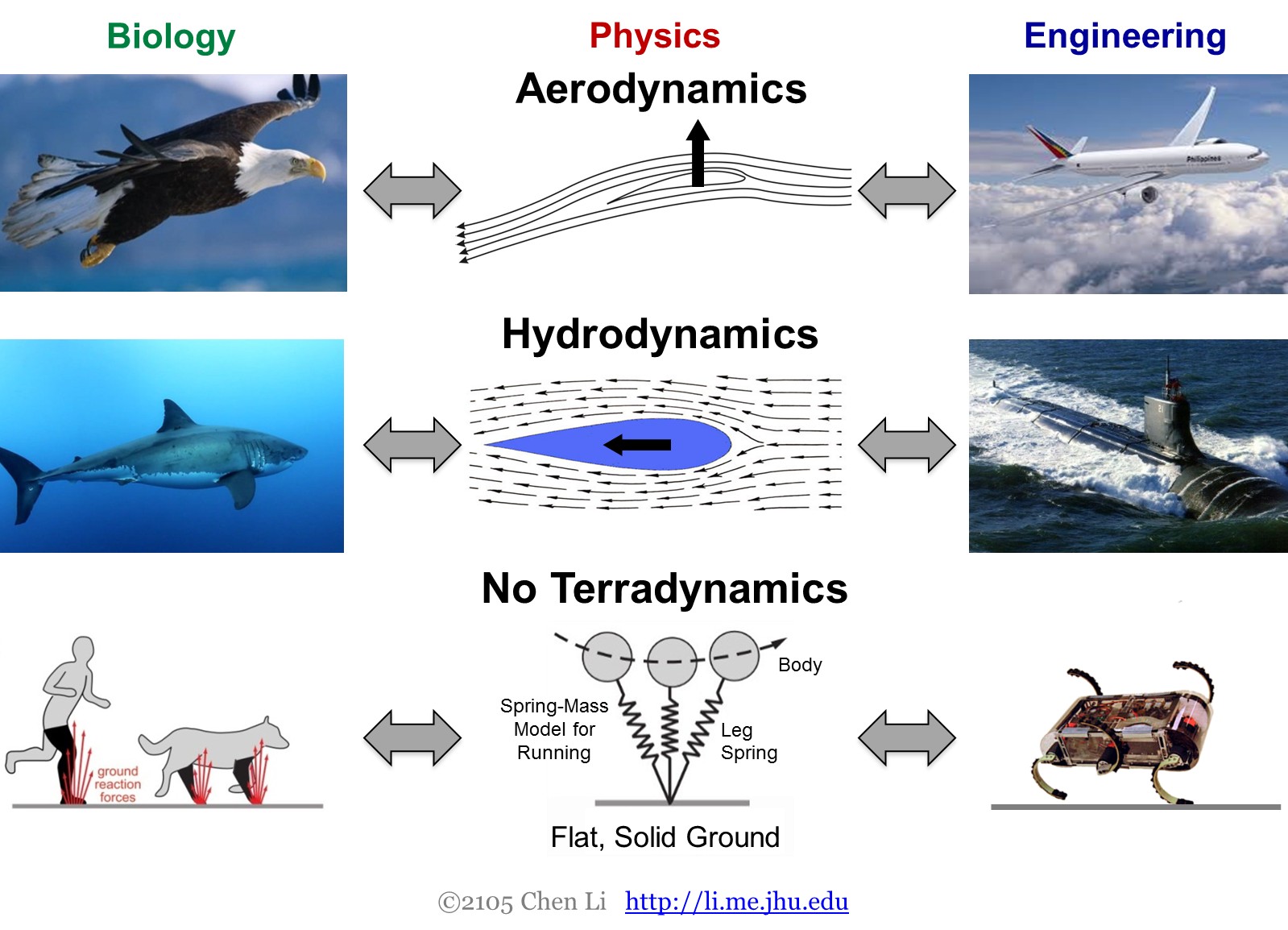
Aero- and hydrodynamics have helped us understand how animals fly and swim and develop aerial and aquatic vehicles and robots that move through air and water rapidly, agilely, and efficiently. By contrast, we know relatively little about how terrestrial animals move so well in natural terrain, and even the best robots still struggle in complex terrains such as earthquake rubble, cluttered buildings, forest floor, mountain boulders, and Martian rocks, an ability required for important applications like search and rescue, structural examination, environmental monitoring, and planetary exploration.
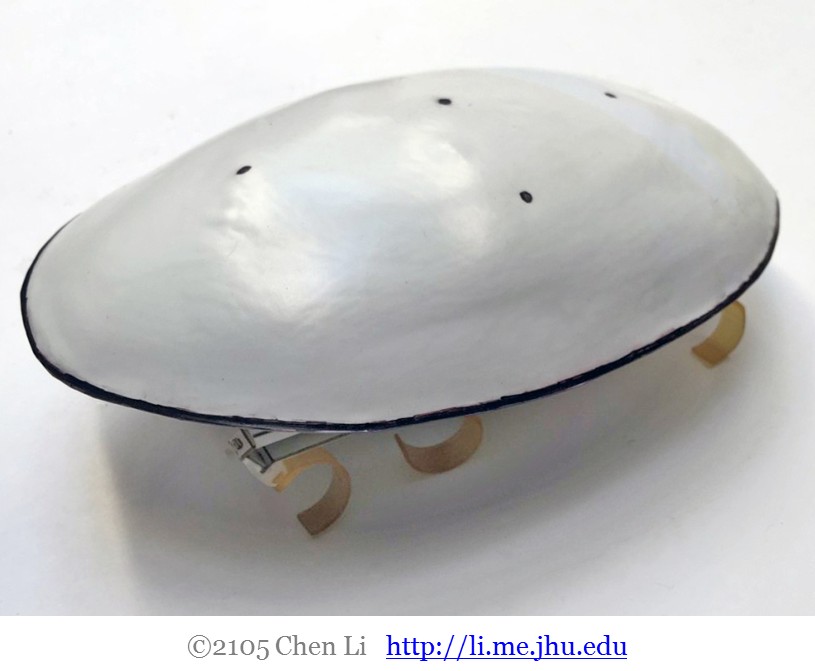
In our lab, we are developing new experimental tools and theoretical models to advance the new field of terradynamics that describe complex locomotor-terrain interaction (analogous to fluid-structure interaction), and using terradynamics to better understand animal locomotion and advance robot locomotion in complex terrains.
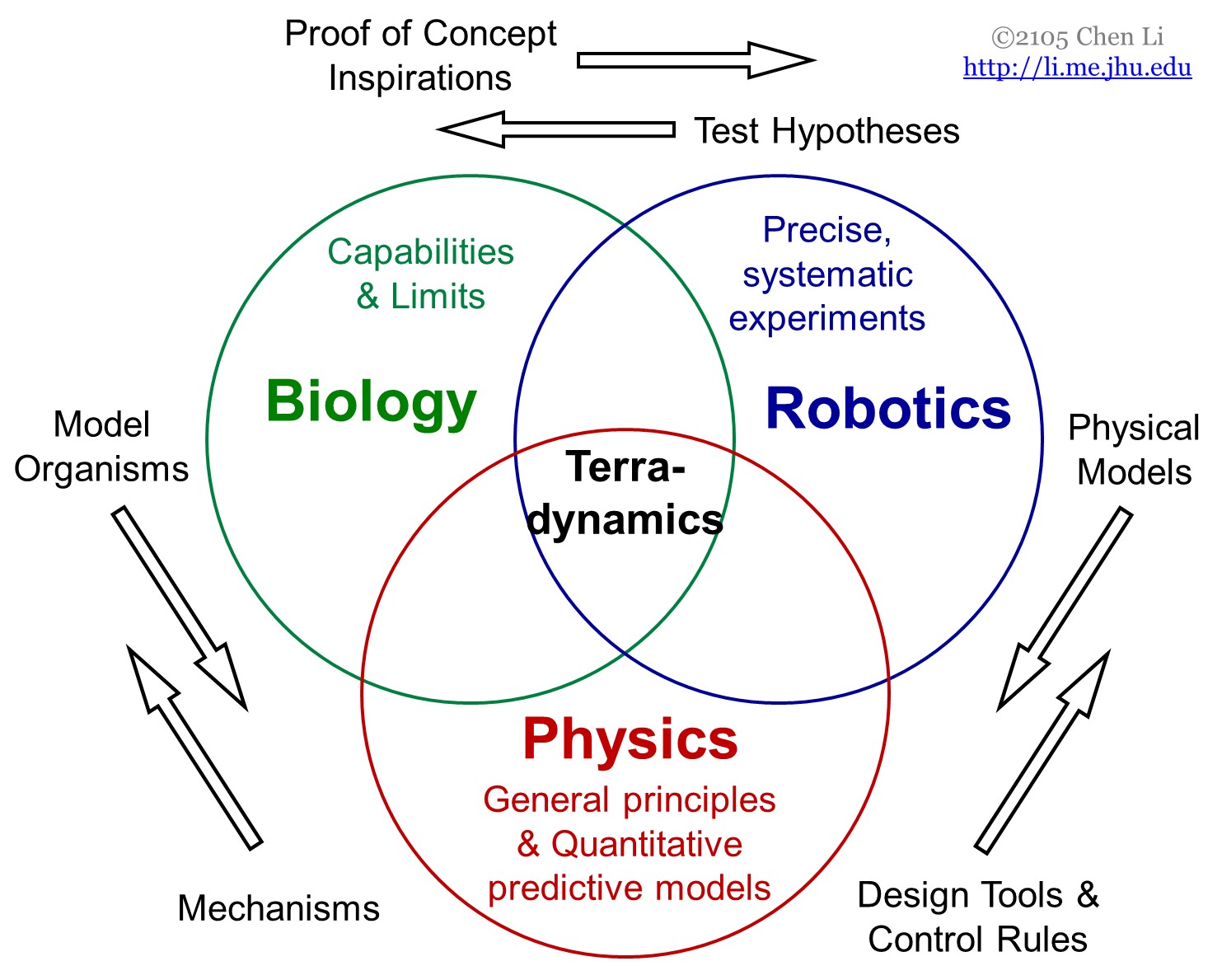
Our Interdisciplinary Team
Analogous to aero- and hydrodynamics, creating the field of terradynamics is an interdisciplinary undertaking at the interface of biology, robotics, and physics. Our group has people with diverse backgrounds in (but not limited to) engineering, mechanics, physics, biology, applied math, and computer science, where each individual has his/her own research domain, but also benefits from the interdisciplinary environment.
We are always looking for motivated and passionate people to join us. If you have interests / background / skills in any of the following, you may find a good fit with our lab.
- Locomotion
- Biomechanics
- Neuromechanics
- Sensing
- Organismal Biology
- Robotics
- Mechatronics
- Automation
- Control
- Reinforcement Learning
- Physics of Living Systems
- Dynamics
- Dynamical Systems
- Simulation
- Stochastic Modeling