
Motivation
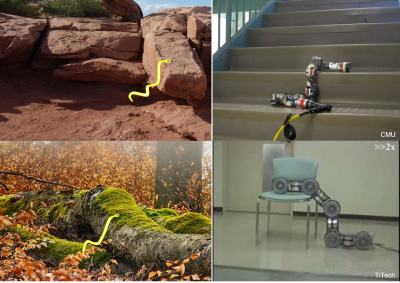
Snakes can move through almost any terrain stably. However, how they maintain such stability, especially when on large, smooth obstacles like boulders and felled trees that lack “anchor points” for gripping or bracing, is less understood. Similarly, snake robots are challenged to stably traverse such obstacles for search and rescue and building inspection. Our recent study discovered that snakes combine body lateral undulation and cantilevering to stably traverse large steps. In this study, we take the next step in understanding the stability principles of large step traversal using lateral undulation combined with cantilevering.
Building a snake robot as a physical model
To test whether the lateral undulation during cantilevering is useful for stable traversal, we developed a snake robot capable of large 3-D body deformation and used it as a physical model to further study the stability principles.

Traversal probability diminishes as step becomes higher because of poorer roll stability
Using body lateral undulation combined with cantilevering, the robot traversed a step as high as near a third of body length with a high probability. In addition, its motion during traversal was more dynamic than previous snake robots that traverse steps using quasi-static motion.
However, as it attempted to traverse higher steps, the robot struggled and its traversal probability quickly decreased. For all step heights tested, we observed that: First, failure was always directly resulting from rolling to the extent of flipping over. In addition, as step height increased, flipping over became more likely, which resulted in decreasing traversal probability. This diminish was a direct result of the shorter undulating body sections for lateral support as the cantilevering body section lengthened as step height increased.
(Click here for a complete video of all adverse events that appeared during traversal.)
Body compliance improves contact and increases traversal probability
Even with large slipping on low friction steps, the snake never rolled as far as losing contact with the surface during traversal. A morphological difference from the robot likely contributed to the snake’s better stability—its body being more compliant. This inspired us to add mechanical compliance to the robot body by adding a suspension system between each one-way wheel and its body segment.
Adding body compliance reduced the robot’s roll instability by improving surface contact, without reducing speed.
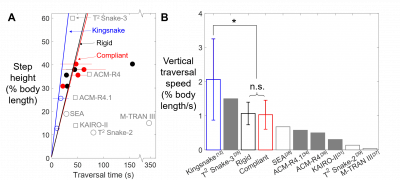
Our robot surpasses previous robots and approaches animal performance
Besides advancing understanding of snake locomotion, our robot achieved high traversal speed surpassing most previous snake robots and approaching snakes, while maintaining high traversal probability. These improvements were attributed to the inherent roll stability from body lateral undulation and an improved ability to maintain surface contact via body compliance, which alleviated the need for precise control for static stability and enabled dynamic traversal.
Related publications
- Fu Q, Li C*. 2020 Robotic modelling of snake traversing large, smooth obstacles reveals stability benefits of body compliance. Royal Society Open Science, 7, 191192 PDF
- Fu Q, Gart SW, Mitchel TW, Kim JS, Chirikjian GS, *Li C, Lateral Oscillation and Body Compliance Help Snakes and Snake Robots Stably Traverse Large, Smooth Obstacles, smooth obstacles, Integrative & Comparative Biology, icaa013, PDF (Invited Paper) Video