
Resistive Force Theory
Inspired by the similarity to low Reynolds number swimmers in fluids, we created the first resistive force theory for granular media to predict forces and movement. The key idea is the superposition principle: the forces on bodies and legs of complex shape moving in granular media along arbitrary trajectory can be well approximated by superposition of forces on each of their elements (Fig. 1). The integration principle is valid for low Reynolds swimmers because, as inertial effects are negligible, fluid flow around elements are local enough that the granular force exerted on element is independent of that on other elements. Considering this, we hypothesized that resistive force theory would also work for granular media.
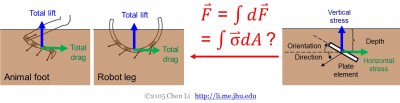
Figure 1. Superposition principle of the resistive force theory.
Resistive Force Measurements
Because animals and robots have complex morphology and kinematics, each element of their bodies and legs can not only be at different depths, but also have different orientations and movement directions (Fig. 1, left). For low Reynolds number swimmers in fluids, how force depends on orientation and direction can be derived from the Stokes Law. But for granular media, we do not know how force depends on them because no such equations exist. Therefore, we used a plate element to make the first measurements of granular forces as a function of intruder orientation and direction (Fig. 1, right).
We discovered that force (stress) depends sensitively on both orientation and direction (Fig. 2, left). Vertical force is maximal when a plate intruder is oriented horizontally and penetrating downward. As soon as orientation deviates from horizontal and direction deviates from downward, vertical force quickly decreases.
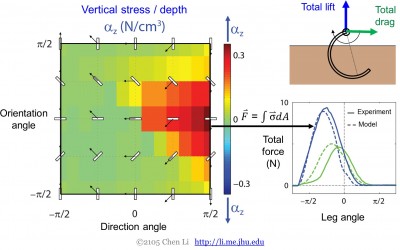
Figure 2. Resistive force measurements and theory validation. Only vertical resistive force measurements are shown for simplicity.
Validation of Resistive Force Theory
Using our granular resistive force measurements, we integrated stresses over leg elements and discovered that resistive force theory can well predict total lift and drag forces on a robot leg moved through granular media (Fig. 2, right). Thanks to the superposition principle, the model is accurate for legs of arbitrary shape and trajectory:
Predictive Power of Resistive Force Theory
Having validated resistive force theory on a robot leg rotated through granular media (prescribed kinematics), we next tested its predictive power on a robot freely moving on granular media. We ran a custom legged robot on granular media with a wide range of stride frequency and leg curvature. As we earlier, the robot moves faster with legs of convex surface facing backward than facing forward:
We then developed a multi-body dynamic simulation of the robot, and used resistive force theory to calculate lift and drag forces on the robot body and legs by integration of elemental forces. We found that the movement dynamics predicted by simulation using resistive force theory well matches experimental observation:
Comparison of experiment and simulation showed that resistive force theory can accurately and rapidly predict legged locomotion on granular media over a broad range of stride frequency and leg curvature (Fig. 3).
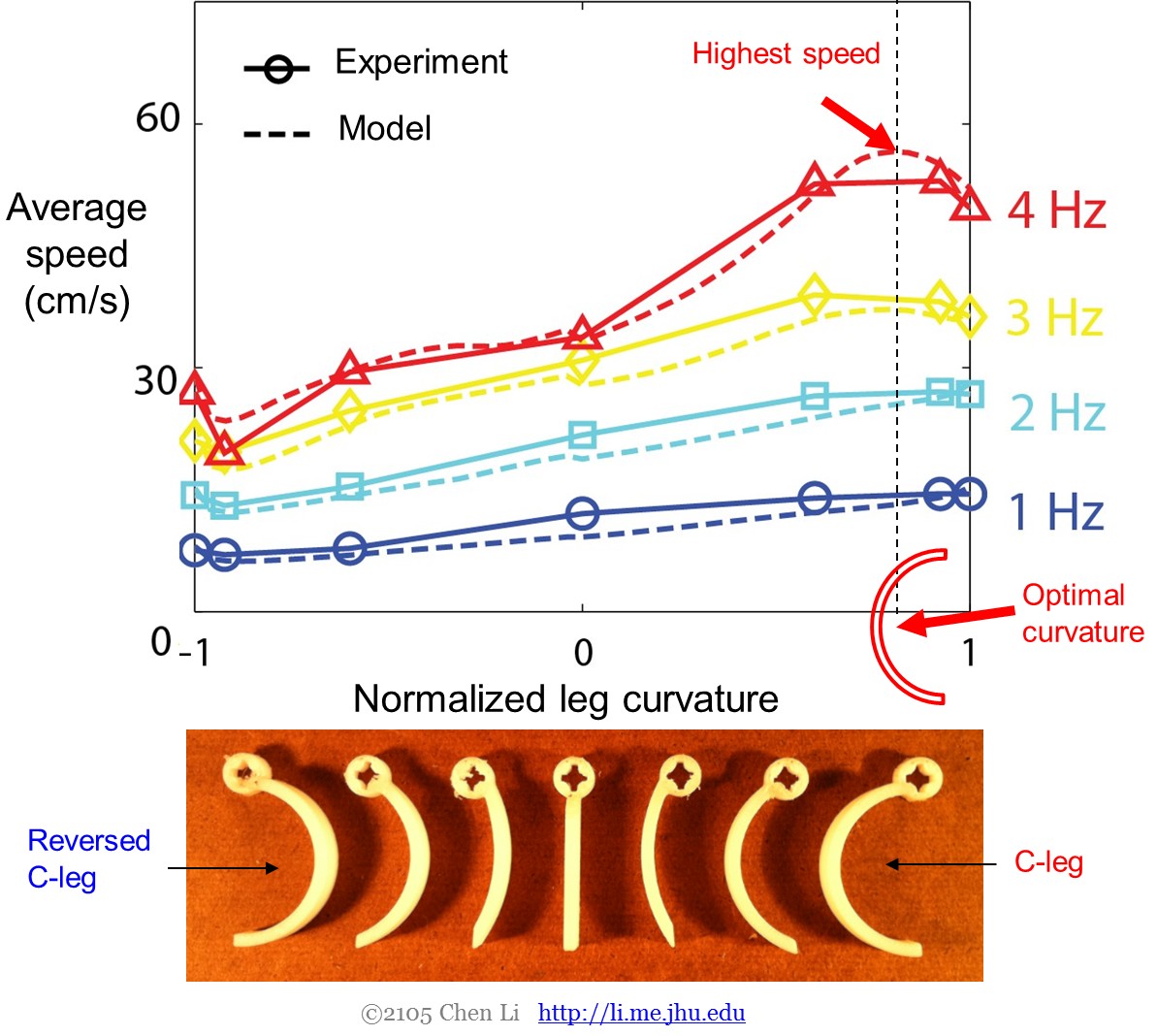
Figure 3. Resistive force theory predicts legged robot movement on granular media.
Because our resistive force theory enabled quantitative prediction of forces and movement in granular media analogous to aero- and hydrodynamics for fluids, we have established the first terradynamics of flowable ground.
Generality of Resistive Force Theory
We made resistive force measurements for a diversity of granular media with different particle size, shape, friction, density, compaction, and polydispersity. We discovered that the dependence of force on intruder orientation and direction is strikingly similar (Fig. 4, left).
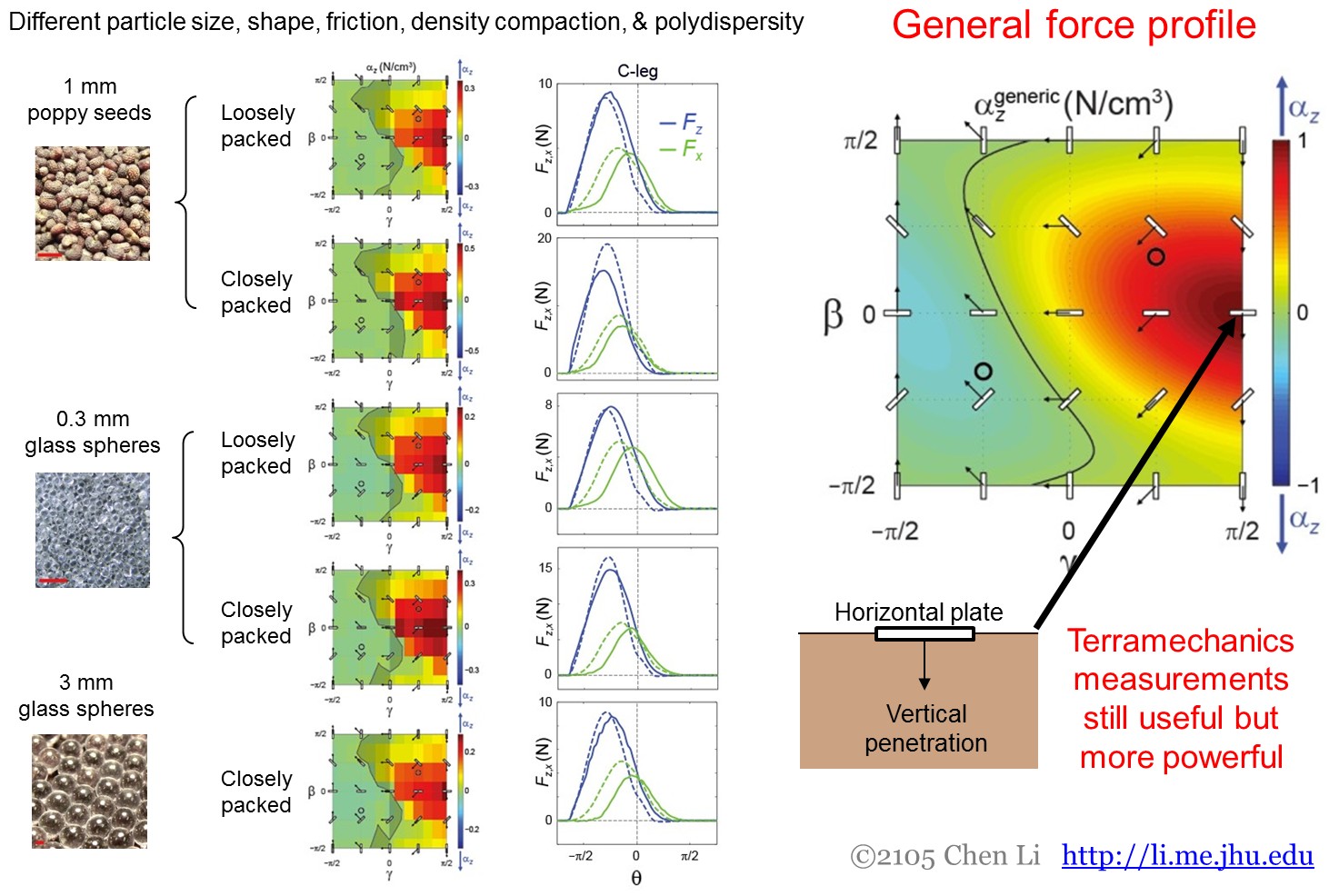
Figure 4. The generality of resistive force theory for a diversity of granular media and its practical benefit.
This provides a major practical benefit. Because these granular media have the same general stress profile, only a single force measurement to determine the maximal vertical force is sufficient to infer forces for other orientations and directions without having to measure all of them (Fig. 4, right). This can be simply done with an off-the-shelf penetrometer. This also means that measurements using a horizontal plate penetrating downward obtained in terramechanical studies can still be used, but more powerfully using the resistive force theory.
Finally, thanks to its superposition principle, our resistive force theory can in principle apply to animals and devices of arbitrary morphology and kinematics (given they operate in the low-speed, non-inertial and continuum regimes). For example, we also discovered that the theory using resistive force measurements in the horizontal plane can predict the movement of the sandfish lizard within granular media.
Why Classical Terramechanics Fails for Mars Rovers
In classical terramechanics, because large wheels and tracks usually have ground interface that are relatively flat and level, vertical intrusion forces in granular media are characterized only by moving a horizontal plate downward (using a penetrometer) (Fig. 5), but not on an intruder at other directions and orientations. This is then used to predict lift, which is then balanced (statically and dynamically) with vehicle weight to predict sinkage.
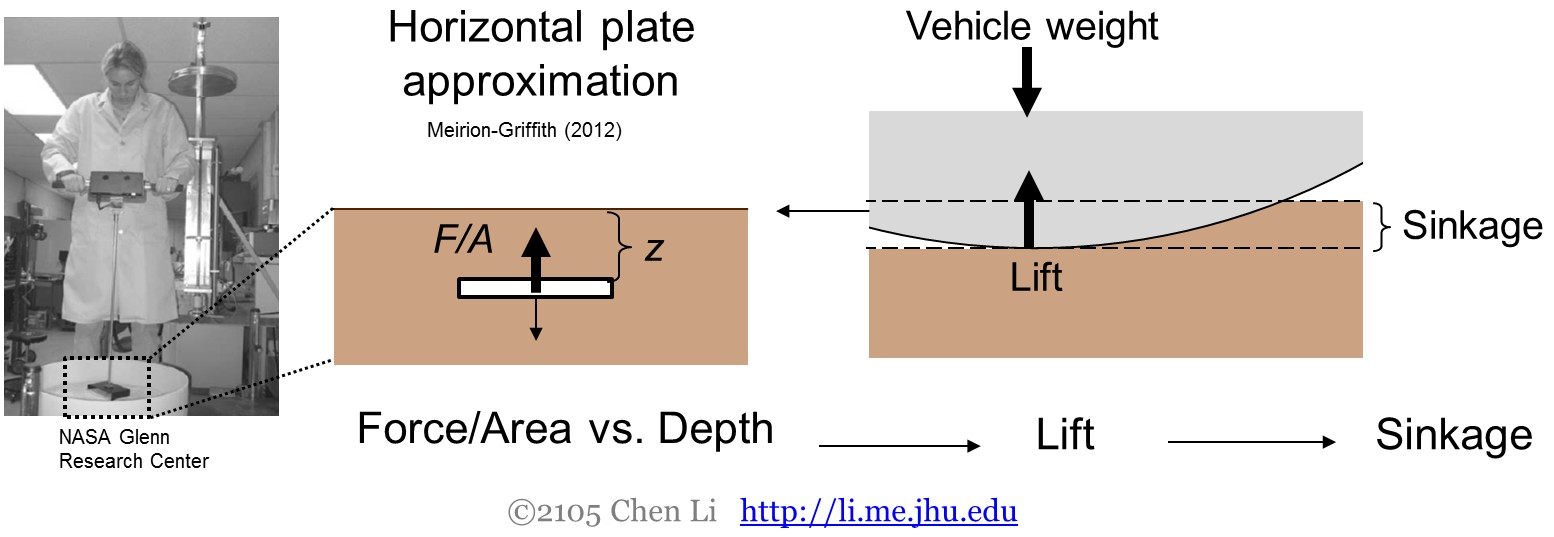
Figure 5. Horizontal plate approximation prevalent in the development of classical terramechanical models.
However, for small wheels of rovers moving on loose granular media (or even larger wheels sunk deeply enough), ground interface becomes highly curved with orientations far from horizontal. As we have shown with our resistive force measurements that account for all orientations and directions, a horizontal plate generally experiences much greater vertical force than one far from horizontal (Fig. 2, left). As a result, the horizontal plate approximation no longer applies, and classical terramechanical models substantially over-predict lift force and under-predict sinkage.
Related publications:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Featured in Nature News & Views) PDF