
Challenge of Flowable Ground
Natural substrates like sand, soil, mud, and snow, and even extra-terrestrial surfaces like Martial soil, can flow like a fluid and re-solidify as animals and robots move on them, and the resulting slip and sinkage challenge their locomotion. However, the ground reaction forces acting on their body and legs are not described by either solid mechanics or fluid dynamics.
Limitations of Classical Terramechanics
Since pioneered work by Bekker in the 1950s, engineers have applied soil mechanics to model large off-road vehicle mobility on terrain like sand, soil, mud, and snow. This engineering field, called terramechanics, has guided the development of large wheeled and tracked vehicles for decades (Fig. 1, top).
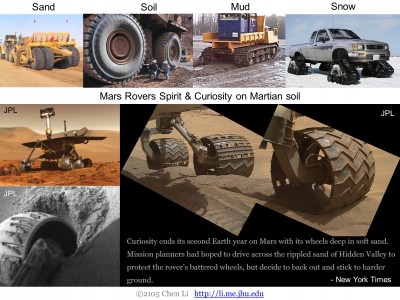
Figure 1. Classical terramechanics for large off-road vehicles and its limitations on small wheeled vehicles.
However, in recent years, terramechanical models have faced significant difficulty when applied to small wheeled vehicles. For example, it under-predicts sinkage, and thus over-predicts performance, for small rovers moving on loose granular media like Martian soil. A hallmark example of this problem is the permanent loss of mobility for the Mars Rover Spirit on loose Martial soil (Fig. 1, bottom left). This has also challenged the more recent Mars Rover Curiosity mission (Fig. 1, bottom right).
Further, because terramechanical models are specifically developed for wheels and tracks (e.g., involving fitting parameters specific to wheels and tracks), they do not apply to other types of locomotors such as legged animals and robots. As a result, how legged animals move on flowable ground is not well understood, and the design and control of legged robots to traverse flowable ground has been achieved by empirical tuning.
Creation of the First Terradynamics
To study legged locomotion on flowable ground, we choose granular media as a model substrate. Compared to other flowable media like soil, mud, and snow, granular media like sand are relatively uniform and simpler as the particles only interact through repulsive contact forces and have no cohesion.
By integrating biology, robotics, and physics studies of legged locomotion on controlled granular media (Fig. 2), we have created the first terradynamics to enable quantitative prediction of forces and movement. Analogous to aero- and hydrodynamics for fluids, this establishes the first terradynamics for flowable ground.
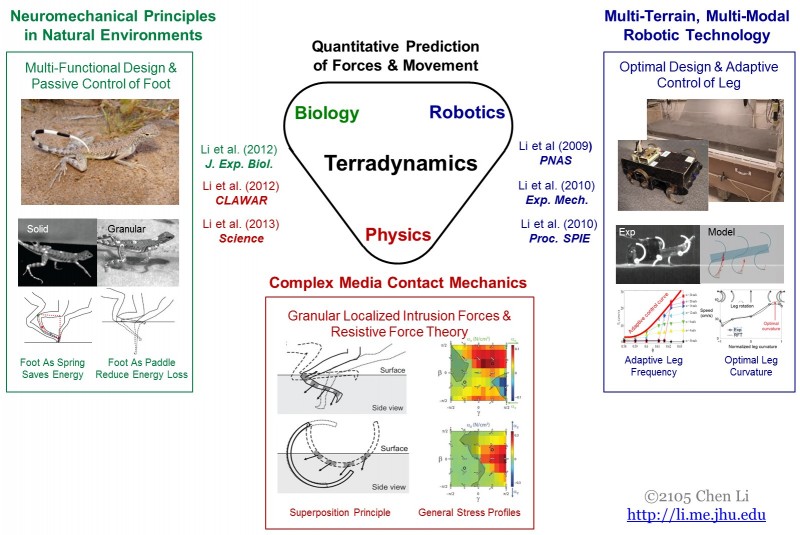
Figure 2. Creation of the first terradynamics of legged locomotion on granular media by integrating biology, robotics, and physics studies.
Our terradynamics also provides insight into why classical terramechancal models fail for small rovers. Because of its generality, terradynamics can in principle be applied to other types of locomotors besides those using legs, including wheels.
Learn more:
-
Control & Variation of Granular Media
-
Biology – Multi-Functional Foot Use
-
Robotics – Leg Control & Design Principles
-
Physics – Localized Intrusion Force
-
First Terradynamics – Resistive Force Theory
Related publications
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Li C (2011). Biological, robotic, and physics studies to discover principles of legged locomotion on granular media, Doctoral Dissertation, Georgia Institute of Technology PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Invited Paper) PDF