
Challenge of Complex 3-D Terrain
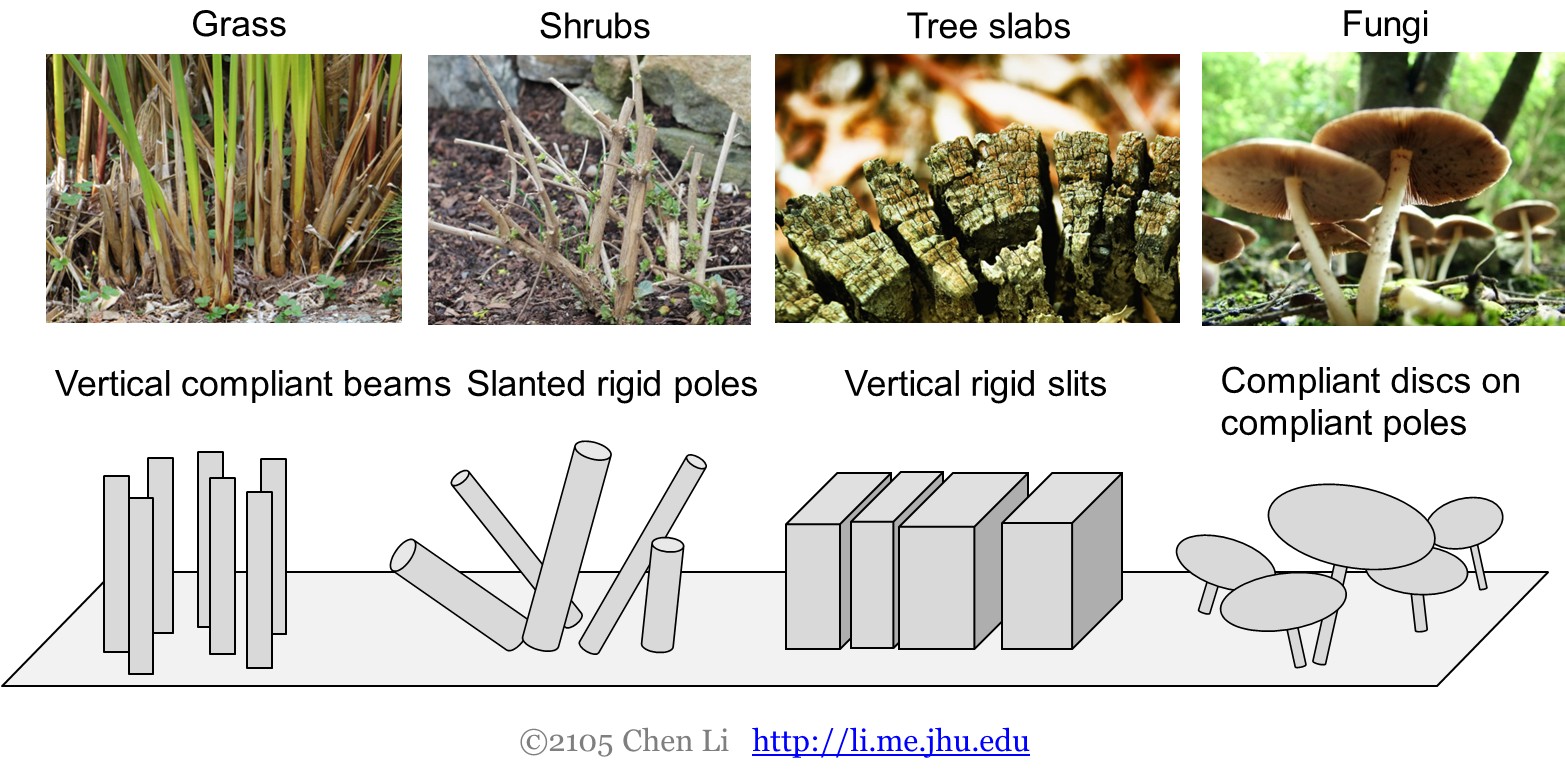
Figure 1. Natural terrain is often filled with 3-D, multi-component obstacles.
Small animals thrive natural terrain filled with multiple three-dimensional obstacles like grass, bushes, vines, trees (Fig. 1). Similarly, small search and rescue robots must move through environments like building rubble (Fig. 2). Such 3-D, multi-component terrain can be challenging to move through for small animals and robots, because the size of obstacles can be comparable or even larger than themselves, while the gaps between obstacles can be smaller.

Figure 2. Artificial environments like building rubble is also filled with 3-D, multi-component obstacles.
To begin to understand movement through such 3-D, multi-component terrain, we pick grass-like beams (Fig. 1, left) as a model terrain for their relative simplicity compared to other more, and created a new ground control device.
Most Robots Avoid Obstacles
Most current robots negotiate obstacles by avoiding physical contact. This is mainly achieved by using mapping and path planning algorithms (Fig. 3, left & middle) based on onboard sensors and computers. This approach has been very successful, and has resulted in advanced robotic vehicles such as the Google self-driving car that reliably avoids stationary obstacles and moving objects alike (Fig. 3, right). For small robots, however, this approach can be challenging to implement, because they just cannot carry much weight and must forgo the extra sensors and computers.
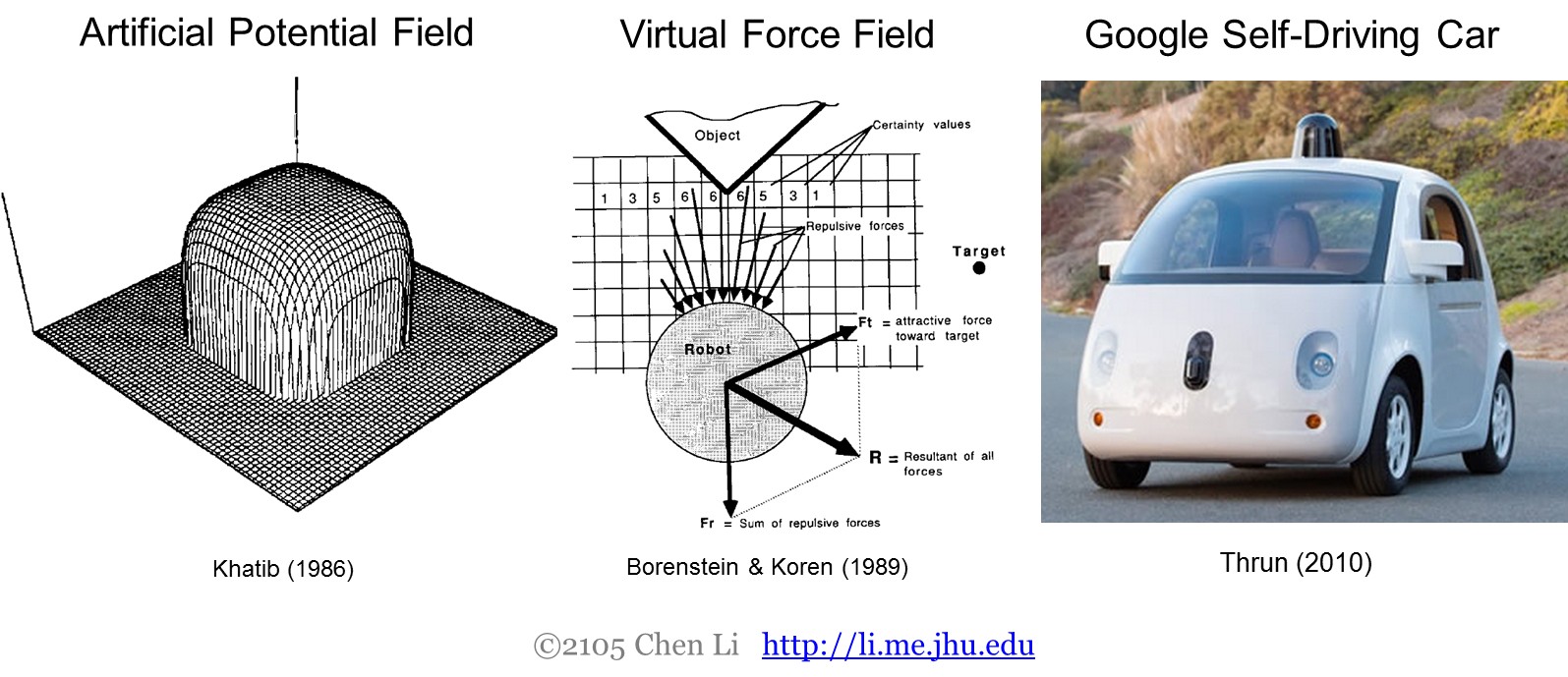
Figure 3. Obstacle avoidance algorithms and a successful example of implementation.
Further, obstacle avoidance algorithms are largely limited to sparsely cluttered terrain, where obstacle gaps are larger than robot size. However, in 3-D, multi-component terrain such as forest floor and building rubble (Figs. 1 & 2), pure avoidance of obstacles may simply become impossible, because there are just too many of them and they are too close to each other that physical contact is inevitable. In this case, obstacle avoidance algorithms such as Artificial Potential Field and Virtual Force Field methods (Fig. 3, left, middle) run into problems, because, as their names indicate, they are artificially defined to facilitate computation and do not describe physical interaction between robots and obstacles.
First Terradynamic Shape to Enhance Obstacle Traversal
Using controlled laboratory model of grass-like beams, we are integrating biology, robotics, and physics studies to systematically study the principles of movement in 3-D, multi-component terrain. Inspired by our discovery of terradynamically streamlined shapes, we have enabled small robots to traverse densely cluttered terrain (gaps size < robot size) simply through mechanics and without sensing and computation. We envision this as the beginning of terradynamics for 3-D, multi-component terrain, which will describe complex locomotor-terrain interaction and eventually predict movement quantitatively.
Learn more:
Related publications
- Li C, Pullin AO, Haldane DW, Lam HK, Fearing RS, Full RJ (2015). Terradynamically streamlined shapes in animals and robots enhances traversability through densely cluttered terrain, Bioinspiration & Biomimetics, 10, 046003 (B&B Highlights of 2015) PDF