
Despite their relative simplicity compared to other flowable media like soil, mud, and snow, dry granular media like sand can still be quite variable. For example, a sand dune can be uneven, sloped, and have compactions that range from loosely packed (easier to sink into) to closely packed (harder to sink into) (Fig. 1, top). Such a large variability can challenge studies of movement on granular media, because measurements will not be repeatable. With so many parameters uncontrolled, it is almost impossible to tell if any experimental observations are due to animals / robot themselves or if they are an artifact of variable environmental conditions.
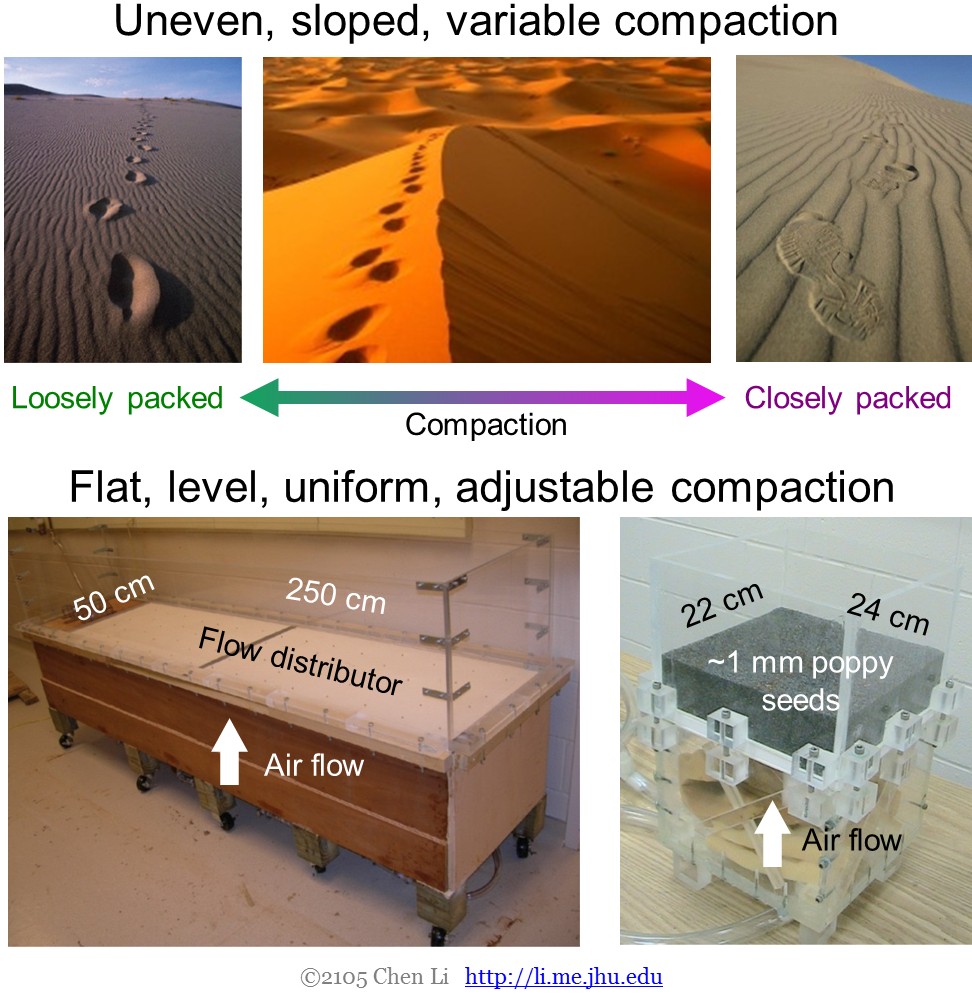
Figure 1. Control and variation of granular media using fluidized beds.
Analogous to wind tunnel and flow channel for studying movement in fluids, we have created devices, called air fluidized bed, to enable precise control and systematic variation of granular media (Fig. 1, bottom). Before each experiment, an air fluidized bed sends a large flow of air upward through a flow distributor to fluidize granular media sitting on top. After air is turned off, particles deposit into a flat, uniform, loosely packed state. Then by repeated air pulses, particles are gradually compacted up to the closely packed state. Thus we have a laboratory model to mimic natural granular media, whose compaction can now be controlled and varied for precise and repeatable experiments.
As highlighted by our robotics and physics studies, such precise control of granular media has proven critical in understanding forces and movement on granular media.
Our device has allowed us to understand animal foot use, robot leg control and design principles, physics of granular intrusion force, and eventually create the first terradynamics of legged locomotion on flowable ground.
Related publications
- Li C, Umbanhowar PB, Komsuoglu H, Koditschek DE, Goldman DI (2009). Sensitive dependence of the motion of a legged robot on granular media, Proceedings of the National Academy of Sciences, 106, 3029-3034 (Featured in IEEE Spectrum and Physics Today; Best Student Paper in DCB at SICB 2009) PDF