
Elongate Feet in Fast Runners
Many cursorial (fast running or hopping) animals have large, elongate feet. In large birds (e.g., ostriches) and mammals (e.g., kangaroos, horses), it is well known that such elongate distal elements are a morphological adaptation to enhance their locomotor performance through elastic energy savings by storage and return of energy in tendons and ligaments (Fig. 1, top).

Figure 1. Fast moving terrestrial animals with elongate feet.
Many small animals like lizards and rodents also possess large, elongate feet, and can run over a diversity of surfaces ranging from solid rocks to loose sand (Fig. 1, bottom). Previously it is thought that animals at such a small scale (mass ~ 10 grams, e.g., kangaroo rats) have feet that are over-built to withstand large stresses during escape, and are thus too stiff to functional as an energy-saving spring.
Zebra-Tailed Lizard – Extreme Performance & Morphology
One of the extreme desert runners, called zebra-tailed lizard, can dash across both rocky plains and sandy washes at speeds of up to 40 body lengths per second. To get a sense of how fast it runs, check out this video:
Not only is the zebra-tailed lizard the fastest running among terrestrial lizards of its size (mass ~ 10 gram, body length ~6-7 cm), but it also turns out to have the largest hind feet relative to body size: its hind foot length (3 cm) is half as long as its body (measured from snout to vent). It is thought that its large, elongate hind feet helps it run fast. However, how this is achieved is not well understood.
is half as long as its body (measured from snout to vent). It is thought that its large, elongate hind feet helps it run fast. However, how this is achieved is not well understood.
Our study has provided the first explanation of this hypothesis. We found that the lizard can maintain the same high performance (20 body lengths per second) on both solid ground and loosely packed granular media in the laboratory. Our experiments and modeling demonstrated that this is achieved by synergistic adjustment of kinematics and muscle function to take advantage of its large, elongate foot morphology.
Foot Use on Solid Ground – Energy-Saving Spring
On solid ground, we observed that the lizard uses a digitigrade foot posture during stance: only the very tips of its toes engage ground, while the rest of the elongate toes pivot about the fixed toe tips. Our observation and calculations showed that, during each stance, foot curvature first increases and then decreases. Because dissection revealed many tendons spanning the entire hind foot, we suspected that the tendons first stretch and then recoil to save energy, much like the case in larger animals.
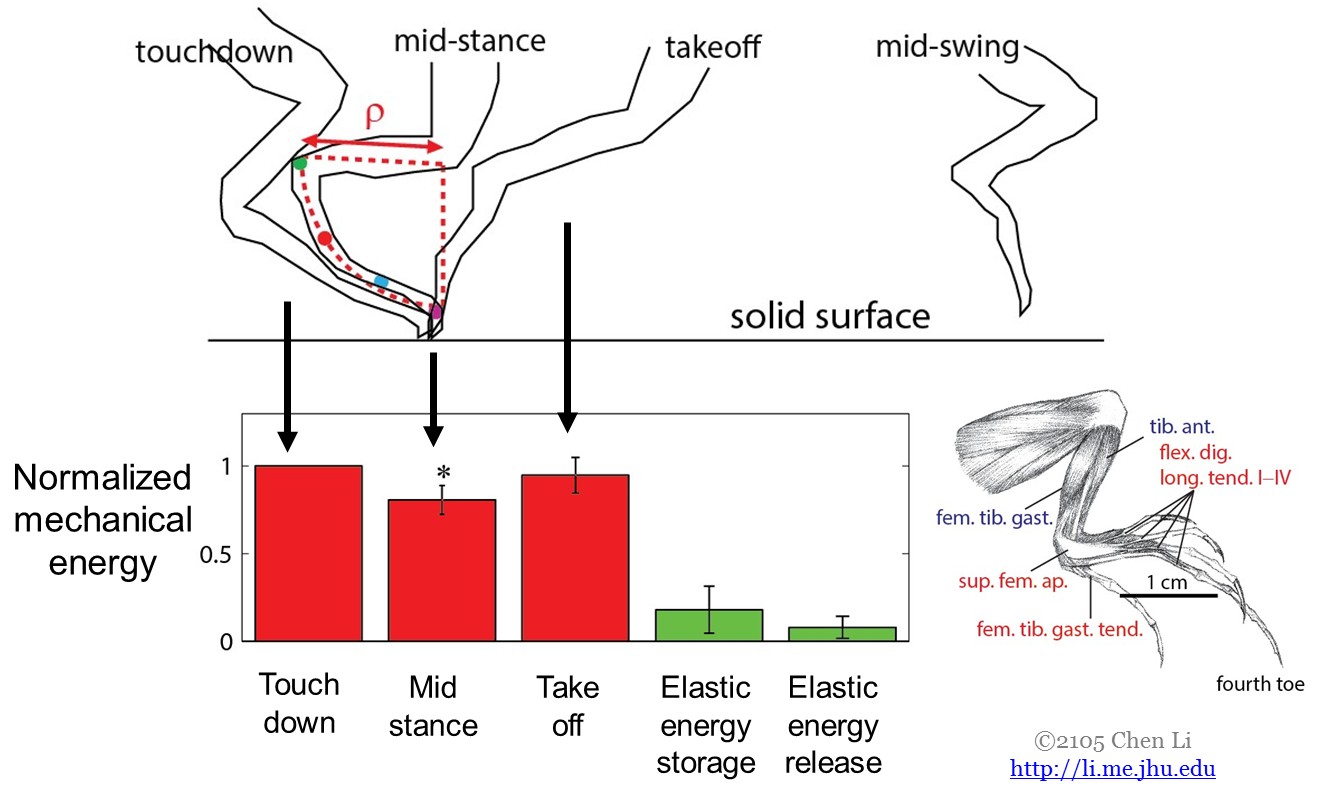
Figure 2. The zebra-tailed lizard’s hind foot functions as an energy-saving spring on solid ground.
Our study provides the first evidence of elastic energy saving mechanisms being utilized by such small animals.
Foot use on Granular Media – Force-Generating Paddle
On granular media, we observed that the lizard uses a plantigrade foot posture during stance: the entire foot touches down in a horizontal posture to maximize contact area, penetrates into granular media and moves subsurface, and retracts from granular media in a collapsed posture. Although the lizard can maintain the same running speed, we suspected that it has to do more work because granular media goes through plastic deformation as the foot pushes on it (Fig. 3).
So we used x-ray experiments to visualize subsurface foot movement (abstract), and developed a simplified granular penetration force model (see physics study) to estimate energy loss during each step. Through these steps, we found that the energy loss during each step equals the elastic energy storage on solid ground. So its foot functions as a dissipative, force-generating paddle instead.
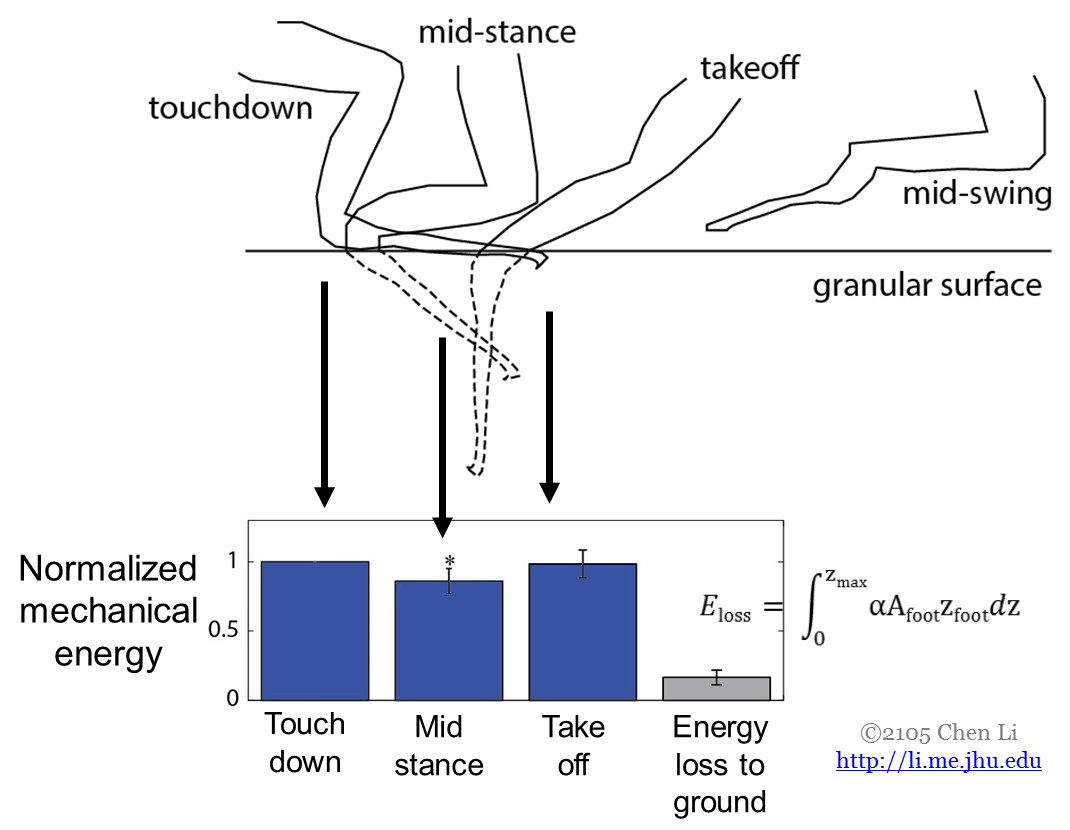
Figure 3. The zebra-tailed lizard’s hind foot functions as a dissipative, foot-generating paddle on granular media.
Therefore, to maintain the same running speed as on solid ground, the lizard must push harder on granular media and do at least three times as much mechanical work, assuming no additional energy loss within the foot. We found further evidence of this compensation from observations that the lizard’s leg extended much more during push-off on granular media.
Related publications
- Li C, Hsieh ST, Goldman DI (2012). Multi-functional foot use during running in the zebra-tailed lizard (Callisaurus draconoides), Journal of Experimental Biology, 215, 3293-3308 (Cover Article) PDF