
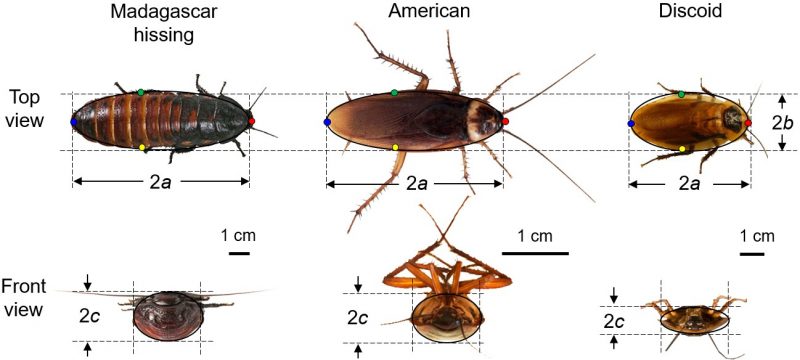
We performed a comparative study of how three species of cockroaches self-right, or recover to an upright orientation after being overturned to an upside-down orientation, an ability that almost all animals must have to survive. These three species differ not only in size and whether they have wings, but also how long their legs are relative to body, and the aspect ratio of the body (length : width : thickness). In particular, the Amercian and Madagascar hissing cockroach’s bodies are more elongate than the discoid cockroach.
Due to these morphological differences, the three species use different strategies to self-right.
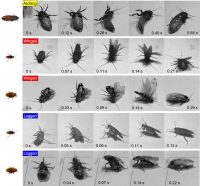
The winged American and discoid cockroaches can both use wings or legs as their main propellers to push against the ground to self-right rapidly. This generates rapid pitching and/or rolling motion (with substantial kinetic energy) to dynamically raise their center of mass.
A major difference is that the discoid cockroach’s self-righting using both wings and legs have a more balanced mix of pitching and rolling motions (i.e., body rotation is somewhere in the middle of pure pitching and pure rolling), whereas the American cockroach’s legged self-righting mainly consists of body rolling.
By contrast, the wingless Madagascar hissing cockroach bends its body into an arch to raise its center of mass and then rolls to either side, and finally uses its legs to wedge under the body to complete self-righting.
For all three species, self-righting is strenuous and often takes multiple consecutive attempts to succeed. We collected and analyzed over 100 trials and over 400 attempts and obtained statistical distribution of how each species transitions between different locomotor modes to self-right. A thicker arrow indicates a higher probability to make a transition. The red arrows show self-transition into the self-mode, meaning that the animal repeatedly uses the same mode.
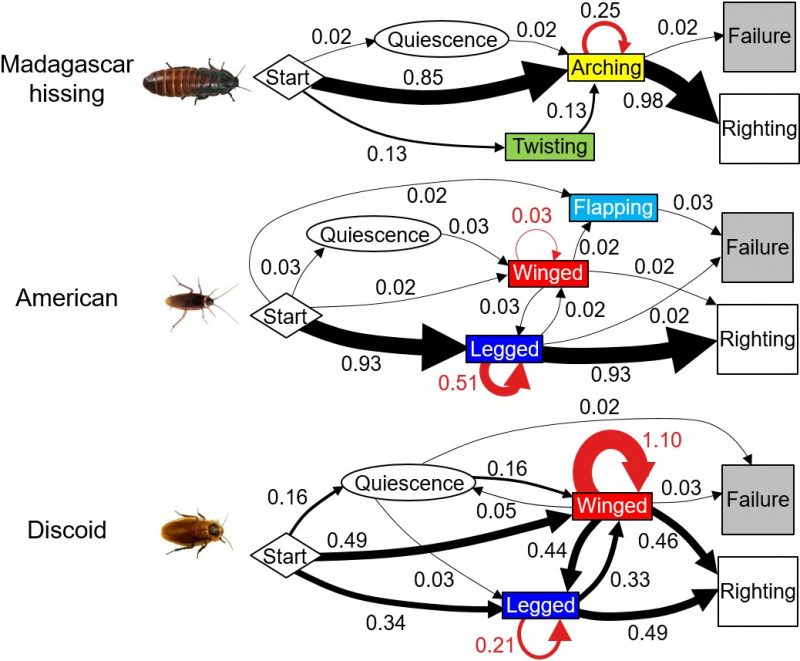
From this analysis, the American and Madagascar hissing cockroach’s self-righting are more stereotyped, most likely using one strategy. The discoid cockroach self-rights via a more balanced use of wings and legs as the main propellers. Also, each species repeatedly uses some modes to continue attempting to self-right when an attempt is not successful.
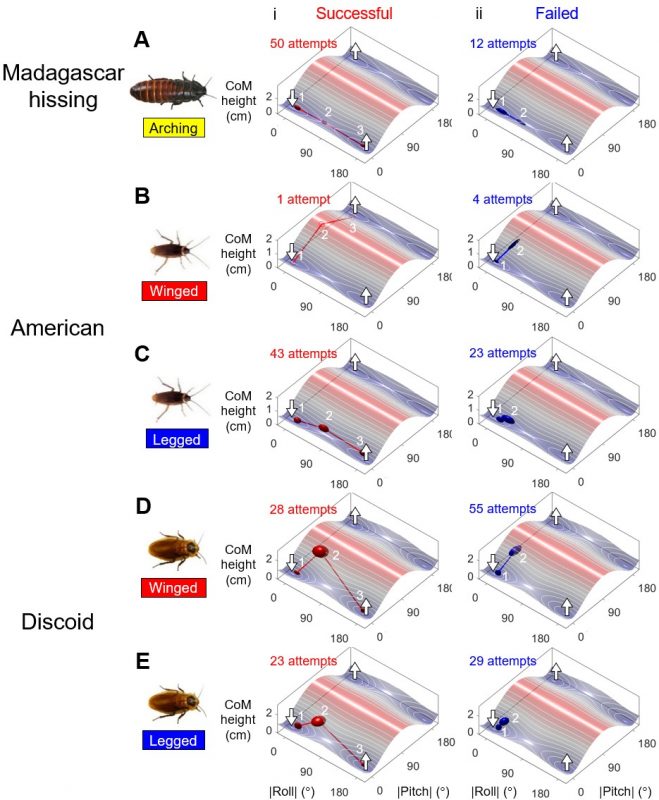
Given all these diverse strategies and transitions among them, a simple trend emerges when we compare successful and failed attempts. For each species, the animal rolls more when they succeed to self-right than when they fail to do so. This can be explained by a simple potential energy barrier model.
The change of orientation of an animal during self-righting can be viewed as moving in orientation space to overcome potential energy barriers. For example, an elongate body pitching by 180 degrees to rotate from upside down to upright must raise its center of mass by a larger amount compared to if it rolls by 180 degrees.
From this idea, we can calculate the potential energy landscape (proportional to center of mass height) as a function of body pitch and body roll (using Euler angle definition), assuming that the body always touches the ground (the animals rarely lifts off from the ground during self-righting). When we projected the trajectories of the animal’s self-righting attempts from upside down (1), to highest center of mass orientation (2), to upright (3), we can see that the animal rolls by a larger amount when the succeed than when they fail, regardless of the species and the strategies they use.
These comparative observations and simple modeling results gave us initial insight into how potential energy barrier governs the diverse strategies of cockroach self-righting.
Related publications: