
Despite their relative simplicity compared to other 3-D, multi-component terrain like shrubs, tree slabs, and fungi, grass-like beam obstacles can still be quite variable. For example, a patch of grass can have various height, width, thickness, orientation, etc. (Fig. 1, left). Such a large variability can challenge studies of movement through these obstacles, because measurements will not be repeatable. With so many parameters uncontrolled, it is almost impossible to tell if any experimental observations are due to animals / robot themselves or if they are an artifact of variable environmental conditions.
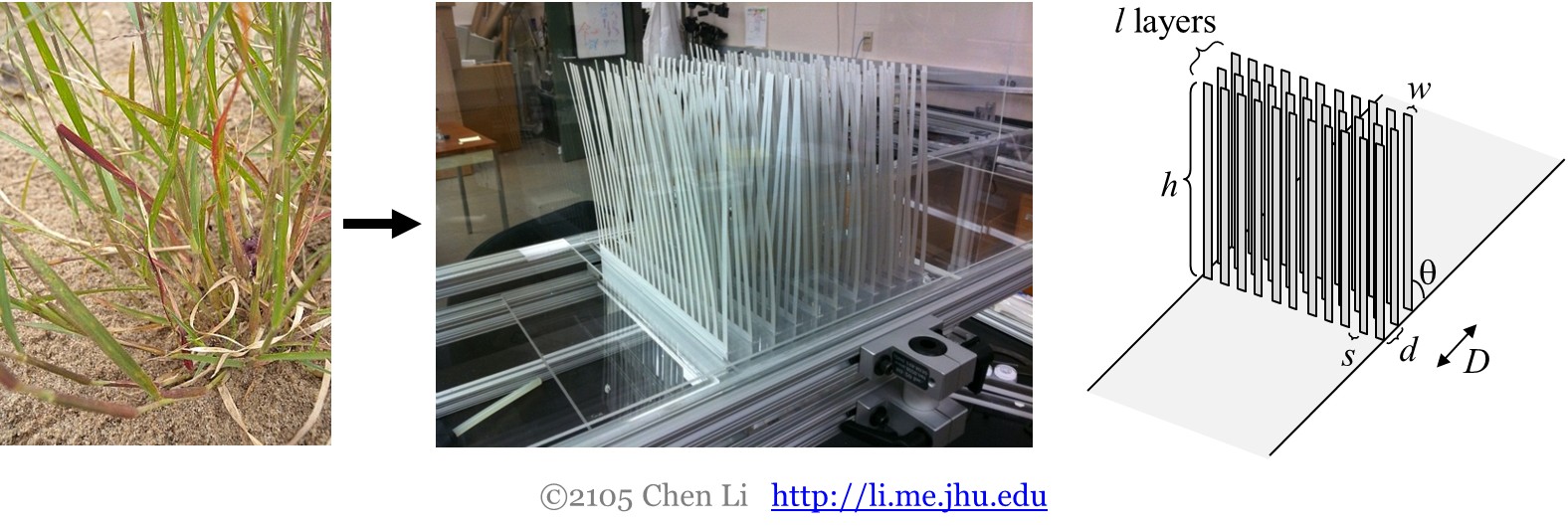
Figure 1. Control and variation of grass-like beam obstacles using laser cut paper.
Analogous to wind tunnel and flow channel for studying movement in fluids, we created a new device using laser cut paper to mimic grass (Fig. 1, middle) and enable precise control and systematic variation of beam parameters (Fig. 1, right), including number of layers (l), width (w), thickness, lateral spacing (s), fore-aft spacing (d), height (h), orientation (θ), stiffness, and damping.
Our new device has allowed us to quantify animal and robot’s diverse locomotor pathways in 3-D, multi-component terrain, and discover the new concept of terradynamic streamlining that enhances traversal of densely cluttered terrain.
Related publications
- Li C, Pullin AO, Haldane DW, Lam HK, Fearing RS, Full RJ (2015). Terradynamically streamlined shapes in animals and robots enhances traversability through densely cluttered terrain, Bioinspiration & Biomimetics, 10, 046003 (B&B Highlights of 2015) PDF