

Control & Variation of Granular Media
Analogous to wind tunnel and flow channel for studying movement in fluids, we create a new device that mimic natural sand and allow precise control and systematic variation of particle properties, and enable precise and repeatable experiments.

Biology – Multi-Functional Foot Use
Desert animals are often thought to have morphological adaptations to accommodate diverse ground conditions ranging from solid to granular. Our study of a fast running lizard with extreme foot elongation shows how it can maintain high performance on both solid ground and loosely packed granular media by synergistic adjustment of kinematics and muscle function to take advantage of its large, elongate foot morphology.

Robotics – Leg Control & Design Principles
Despite decades of terramechanics studies of wheeled and tracked vehicles, little is known about how to move legged robots effectively across granular media like sand. We study how legged locomotion depend on granular compaction, leg kinematics, and leg morphology, and develop physics models to elucidate how legs should be controlled and designed to generate effective locomotion and avoid failure on such precarious flowable ground.

Physics – Granular Intrusion Forces
While much is known about the physics of globalized forces in granular media relevant to material handling industry, localized forces during movement of animals and robots on granular media is less explored. We study how granular intrusion forces depend on both intruder parameters and particle properties, and discover frictional vs. inertial fluid regimes.
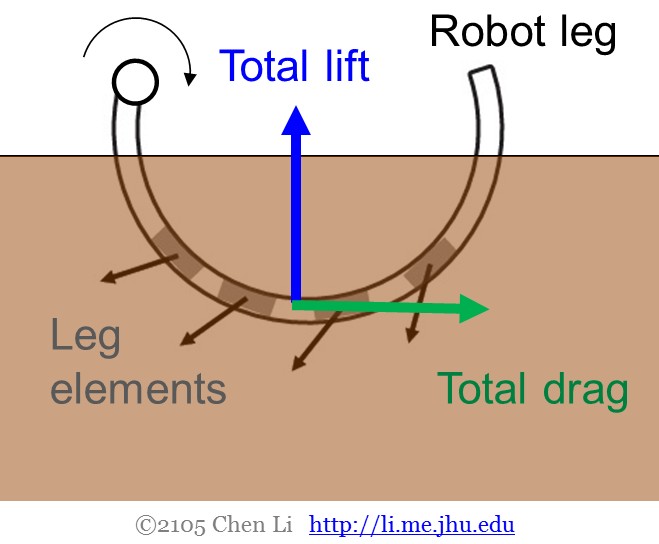
First Terradynamics – Resistive Force Theory
Inspired by the similarity between granular intrusion forces in the frictional fluid regime and low Reynolds number fluids, we created the first resistive force theory for granular media to predict forces and legged movement. Our theory is general not only to a diversity of granular materials, but also to other types of locomotors beyond legged ones.