
More supplemental movies and press release.
Download Gap Paper
Download Bump Paper
Summary of results:
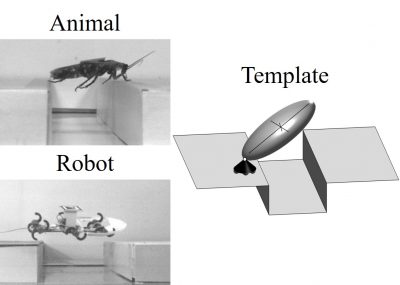
1. Insects and legged robots can rapidly traverse large gap (up to 1 body length) and bump (up to 4 hip height) obstacles at speeds typical of running.
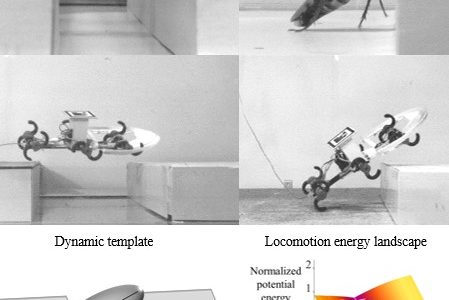
2. For dynamic gap traversal, we developed the first template model for locomotion in a 3-D terrain.
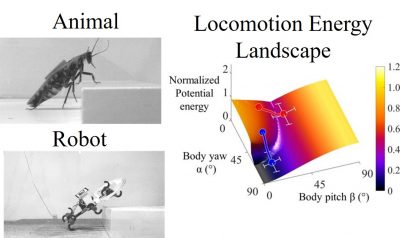
3. For large bump traversal, we developed a locomotion energy landscape model to explain why body-terrain interaction affects traversal.
4. Based principles from these models, we increased the robot’s maximal traversable gap and bump size by 50% and 75%, respectively, using active body pitching.